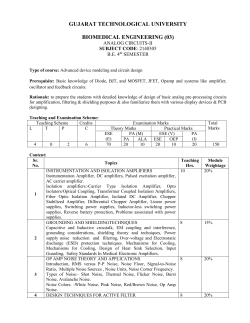
Original Report An Optimum Linear Receiver for Transmission Systems with Noise Depending Multiplicatively upon Signals MikioTAKAHARA (Received August 31,1978) Abstract The considerations of the optimum reception of systems with additive and multiplicatively dependent noises are very useful. Besides, the analytical results are much desirable to obtain the conception of behavior of those systems. But it is very di伍cult, even if by numericaI evaluation, to estimate the optimum reception with high fidelity for those systems. In this paper, for the above purpose, we assume the simplest model including the multi− plicatively dependent noise and calculate the impulse response of the optimum filter for the two different criteria:signal−to・noise ratio(SNR)in a digital system and mean square error in an anlog one. For the first criterion, the optimum丘1ters of two cases, that is, systems with and without intersymbo1・interferences, are considered. In the former systems, the impulse response of the optimum丘lter is hardly different from the conventional one. For the second criterion, the optimum丘lters of three cases are discussed:(a)continuous wave,(b)isolated wave and(c)PAM wave. For the last case, under some restrictions, the optimum filter can be composed of the cascade connection of a matched丘lter and a transversal filter. noise, because of its ease of treatment, 1. INTRODUCTION Some practical examples containing the multipli・ An input−output relation in any system may be お の generally represented, in a sense, by a sort of problems based on irregularity of Earth surface2), catlve nolse are shown as follows;the multi・path− transmission systems, in which signal and, noise the fading channel problems3), the analysis of which is undesirable to be transmitted, exist. automatic gain control4), the structual noise prob・ Moreover, the noise is classified into two groups lems in the image engineering5), etc. Though the such as noise independent of signals and noise noise’generated・processes as shown in these ex− dependent on them. The former is represented by amples may be distinguished respectively, the the thermal noise, while the latter may be supposed following consideration for the multiplicative noise various types of dependency on signals. Then to may give a suggestion or help to solve vari皿s solve generally the optimization problem of systems types of noise depending on signals. containing the noise depending on signals, may be We have already reported the maximum likelihood very di伍cult. For example, Dr. Horiuchi treated detector6)in the system containing thermal noise, with this problem using the conception of the multiplicative noise and intersymbol interference. non・linear transduceri). Then, in this report, the optimum linear receiver, For the first stage to consider various types of of which criterion is signal・to−noise ratio(SNR) dependency, we treat with noise depending on in digital systems or mean・square−error in analog signals multiplicatively, that is, multiplicative systems・is considered in transmission systems 一47一 December 1978 Report of the Faculty of Engineering, Yamanashi University No.29 containing two types of noises such as noises where Ml(t)is a zero・mean random variable and independent of and dependent on signals. ロ mo 1S a COnStant. First of a11, the optimum linear丘lter for an 2. TRANSMISSION SYSTEM MODEL isolated pulse without intersymbol interference and Generally speaking, noise depending on signals then one for pulse・sequence with intersymbol inter・ is shown with a functional F{zo(り}of received ference are considered. signal zo(り. The simplest type of this functional 3.1.1 1SOLATED PULSE may be expressed a product m(t)by zo(t), i. e., Signal power at the decision point t=O is m(り・20(t).Then a consideration for an optimiza・ ・i…1・・w・・一 tion problem of reciver of systems containing such 早轣F..(M1(・) 栩・)・・(・)カ()d・]2}t.。 amultiplicative noise may be very available for considerations of noise generally depending on signalS. 一・・ The transmission system model is shown in Fig. o∫:..・・(・)h(一・)d・}2, (・) Where E。[・]shows ensemble average for x. 1,for which analysis is performed in this report. Additive and multiplicative noise are, respectively, 3. OPTIMUM UNEAR FILTER IN DIGITAL additive noise power −∫:..N・H・(ω)4ω一N・∫ン・(一・)d・・(・) TRANSMISSION SYSTEMS In this chapter, singnal’to・noise ratio is adopted multiplicative noise power as a criterion in digital systems and the filter −∫:..∫:..Em・』⑳1(・)]・・(t)・・(・)h(−t) maximizing the criterion is defined as the optimum ×h(一τ)dtdτ, (5) linear filter. Then the formulation for this purpose is performed and impulse responses of the optimum where H(ω)is the Fourier transform of h(り. If linear filter are computed under various specific the fluctiation part of the multiplicative noise is conditions. white, we have 3.1 FORMI几ATION Em、[Ml(t)Ml(τ)]=Moδ(t一τ). Throughout analysis in this chapter, it is assumed Substituting Eq,(6)into Eq.(5), that the received signal zo(t) contains the effects (6) E・・(・)−M・∫:..・・2(・)h・(一琉 (7) of transmission line, the instantanious decision is t used and additive noise is white. Then, SNR at From Eqs.(3),(4)and(7), SNR is the decision point is defined as SNR−m・2 SNR=signal power at the decision point/ o∫°° ) ...2・(τ)h(一τ)dτ} N・∫:..h・(一・)d・+M・∫:..・・2(・)h・(一晒 (additive noise power十power of noise depend− ing upon signals十intersymbol interference). (8) (1) Then, provided that the linear filter output at t= o, Under preceding conditions we would determine that is, y(0) is the impulse response of the optimum linear丘1ter ・(・)−m・∫:..・・(・)h(一・)d・−A(・・n・t・n・)・ which maximizes Eq.(1). Throughout this paper the multiplicative term (9) 〃2(t)is shown as the maximization of Eq.(8)is equal to the minimiza一 m(t)=m1(t)叫ト〃lo, (2) x(の 。。(り 。(の Mi(t), n(t):stationary random processes TRANSMISSION LINE G(f):transfer function of transmission TRANS− MITTER with zero−mean. G(f) 9(の m(t) n(t) Hω h(t) =m、(の+m。 一48一 line. Fig.1 Transmission system mode1 An Optimun Linear Receiver for Transmission Systems tion of the denominator of Eq.(8). Adding Eq.(9) as a condition to the functiona1, consequently the o∫:..・・(・)h←・)d・}2 θ・・m・2 SNR= new functional l is (16) ∫。[h(一τ)] where ・−N・∫ン・(一・)d・+M・∫:..・・2(・)h・(一・)d・ ・・[h(一・)コーN・∫:..h・(一・)d・櫛・2顯E[θ・θ・] +z om・∫:..・・(・)h(一・)d・−A} (1・) ・∫:..∫:..・・(・−iT)・・(t一ノT)h(一・)h(一りd・dt whereλis Lagrange multiplier. +再[・1θ・]∫1..∫:..E[m・(t)Ml(・)]・・(・一の Applying calculus of variation to Eq.⑩, the impulse response of the optimum linear filter is h・@)一 ×z。(オー元7’)h(一τ)h(−t)dτdt ッ当識。(λ・一一λ)・al) Using the same procedure used for Eq.(10), the functional of Eq.㈹is If Mo=O in Eq.(iO, the optimum impulse response ・一・・[h(一・)]+m・θ・λ{∫:..・・(・)h(一・)d・−A}・(・カ is h・(り一λ゜m° ノ一り ⑫ If we write h(t)as ho(t), the minimization of Eq. ⑰is which is in accord with the response of the con− 」Voho(一τ)十mo2ΣΣE[θ‘θゴ]Zo(τ一iT) ventional rnatched filter. i2EOJキ0 ・∫:..・・○τ)h・←t)dt+翠写[θ馴・一の While, If、No=O in Eq. ai), the optimum impulse response ls ・∫:..E吻⑳・(・)]・・(t−∬)h・(−t)dt h・(り一M。禁汀(・・←t)キ・) ⑬ which is in propotion to the inverse of the time・ +λ、〃2。θ。z。(τ)=O as) whereλ1=λ/2. reVerSal・signal. Though to solve generally Eq.国 for ho(り is 3.1.2PULSE SEQUENCE WITH INTER− difficult, we can solve it by assuming the whiteness SYMBOL INTERFERENCE In this chapter, we express a binary symbol of multiplicative‘noise(cf. Eq.(6))as follows; ho(り sequence as{θτ}(θt=Oor 1, with equal probability) and a i・th received signal asθτzo(t−iT). There 一一 香Eθ・Z・Z・←t)−m・誓恩。E[θ1θ・]Z・(+のy・ 2V。+Q(一り are two distinctions from the preceding case, one (19) of which is that the system has the third noise component of intersymbol interference and the other is to have to rewrite a multiplicative noise term then ,、−m。「°° z。(t−IT)h。(−t)dt °° @Moλ1θoZO(τ)20(τ一IT) dτ intersymbol interference −・2 ⑳ J−co as follows. ・・一一 .。. 」v。+Q(τ) 福d[θ1θ・コ/f..∫:..・・(・一の ..〃2・Z。(τ一1T)ΣE[θ、θプ]2。(τ一の ∫ 一婆。・・... 景Q(。) d・ ×z。(‥ゴT)h(一τ)h(−t)dτdt ⑭ ㈱ multiplicative noise power Q(り=MoΣΣE[Otθ」]ZO(’−iT)ZO(t一ノT) 一習E[θ・θ・コ∫:..∫:..E[Ml(・)Ml(り] i フ (−m≦ゴ,ノ,19n) 幽 ×z。(t−iT)z。(τ一刀’)h(一τ)h(−t)dτdt ㈹ where m,〃are a number of time slots due to Where T is a pulse interva1。 Therefore noise is intersymbol interferences of zo(t)and ho(り. We donoted by sum of three components of additive can obtain the required impulse response ho(りfrom noise, multiplicative noise and intersymbol inter・ Eqs.(19),¢◎and¢]). ference such as Eqs.(4),(11i and(15), respectively, 3.2 CALCULATEI)RESUI.TS the SNR is To consider the effects of multiplicative noise for 一49一 December 1978 Report of the Faculty of Engineering, Yamanashi University 1.0 べ 刀 No.29 A(2) 敵((・) i1) (2) 古 一2.0 0 一1. 霊疏さ z;IL; 2.0 @ ク t/T 一〇.4 0.4 (1) Input SNR==18.4dB t/T (2)Input SNR=17.6dB Input mu1/add=36.8dB Input mu1/add=3.2dB Fig.2 .1.0 Impulse response of optimum filter in Input mul/1.1.・=−14.1dB Input mu1/1.1、=−4.1dB systems without intersymbol・interference Output SNR=28.3dB Output SNR=23.9dB Fig・5 1mpulse response of optimum filter (1) Input mul/add=−7.9dB (2) Ihput mul/add=・−O.9dB Input SNR=・19.2dB Input SNR= ・17.2dB Output SNR=26.8dB Output SNR=25.5dB Output mul/add =−9.5dB Output mul/add=−3.OdB ln systems with intersymbol interference 1.0 (3) Input SNR=10.2dB Output SNR=20.ldB 1.0 NtXx 0.5 Input mul/add=9.ldB Output mul/add=4.2dB 藻 i 、、 1 10 0.5 一9、 、 、 、、 20 { </(2) 一 一 一 60 50 40 30 10 f(1/T) f(1/T) Fig.3 Spectrum of impulse response of Fig.2 Fig.6 Spectrum of impulse re・ sponse of Fig.5 1.0 1.0 、(3) ’ 7 /ノ input waveform \ 一3.0 ・2.0 一2.0 3.0 \. 0 \ 一1.0 一〇.4 一〇.2 O 0.2 0.4 1.0 t/T t/T Fig.7 0utput waveform of optimum filter Fig.4 0utput waveform of optimum丘lter signals, characteristics of ho(t), Ho(f) and y(t) From above results, it is known that the optimum are computed for the various ratios among three linear丘lter’s impu1§e response of systems with noise components, i. e.,additive noise, multiplicative dominant additive noise and without intersymbol noise and intersymbol interference. Then zo(りis interference has a kind of dent at the top of assumed to be the gaussian waveform. response. The results may be qualitatively explained Now characteristics of ho(t), Ho(f) and y(t) as follow. Since the noise component increases at with parameters of the ratio of multiplicative noise an instant of the large amplitude of signals, a power to additive noise power, are shown in Figs. filter intendes to relieve signals from the effects 2∼4,where intersymbol interference can be neg・ lected, and shown in Figs.5∼7, where intersymbol interference can not be neglected. of noise. When intersymbol interference and addi・ ウ コ tlve nolse are negligibly small, the impulse response of the optimum五1ter rises up abruptly at t=T 一50一 An、 Opt.imum Linear Receiver for Transmission Systems (consequently the response dents at the neigh− Then as the linearity and the time invariancy of bourhood of t=0). Consequently the transfer systems are assumed, function occupies considerably wide band. Then 〃、、(s,σ)=〃、、(s一σ), ¢カ according as additive noise increases, band width h。(ちσ)=h。(t一σ), 2s) can not help becoming nallower to obtain good SNR. le、w(s,り=㌦(s一り ⑳ Therefore, the impulse response approaches asymp・ are obtained. Moreover if t=O in Eq.26), we obtain totecally the gaussian waveform according as a ∫:..le・z( ・)h・(・)d・−kwz(・) e◎ parameter of mul/add decreases. While for the signal with intersymbol interference such as a sampling function type, we obtain an analogous result of the conventional response instead of Eq。㈱. By means of the Fourier trans− form of Eq.㈹, we obtain H。(∫)=1(w、(∫)/1(、、(∫). 勧 Hereatfter, a function expressed with the capital waveform. letter shows a frequency domain function and a 4. OPTIMUM LINEAR FILTER FOR ANALOG small−1etter・function a time domain function. TRANSMISSION SYSTEMS Now, three cases as speci丘c examples are dis− In this chaper, the mean・square・error is chosen cussed as follows;(a)acontinuous signa1,(b)an as a criterion for optimization and a filter minimizes isorated pulse,(c)aseries of PAM signals. this criterion is defined as the optimum linear filter 4.1 0PTI]MIZATION FOR CONTINUOUS for this analog transmission system. SIGNAL Criterion l is As a transmitted signal x(の1s continuous, the 1=E[ly(り一w(り12] 23) considering system is stationary. Therefore, w(t) where y(t)is a filter output and w(りis the refer・ and z(t) are respectively ence signaL Then we want to decide h(t, s)which ω(り=x(り, 岡 ・(’)一願)∫:..・(・一・)・(・)d・+・(り倒 minimizes 1. Here, s is a variable of time due to without time−invariant condition. Using ・(り一 全{〃2、(t)+m。}20(り+n(り 轤P..h(ち・)・(・)4・ (in where勿(りand n(りare illustrated’in Fig.1 feach・.noise is not assumed), a which whiteness o Eq.㈱becomes transmission line is time invariant and its impulse 轣F..∫:..〃・・(・,・)h(ち・)h(ち・)d・∂・ ∫一 response is expressed as g(t). −2∫1..h(魂・(s・・t)∂・+〃一(ちり 24 Auto−and cross correlation functions of z(t)and x(り are, respectively where z(t)is a filter input and lexa(sの, kzw(s,t) are defined as ㌧(s一り=㌦(s一りk。。。。(s一り+lenn(s一り,(34 1e。。。(S−t)=〃Z。カ。。。(∫−t) 陶 〃、、(s,t)=E[z(s)2(り], Substituting the Fourier transforms of Eqs. B4 and ゐ、ω(s,’)=E[2(s)w(’)]. ⑳ βS)into Eq. BO They are auto−and cross correlation functions of processes z(のandω(り. Hereafter above expres− sions of subscripts are used to denote correlation 1(、、(∫)=K㌦m(ゾ)⑧瓦。。。(∫)+1(。。(∫), ㈹ K。。。(∫)=Kxx(f)G*(∫). βカ Then the optimum linear filter transfer function functions. Ho(ア)is shown as Substituting auto−and cross correlation functions H。(f) into Eq.幽and applying calculus of variations for 〃201(xx(∫)G*(f) the results, the impulse response of the optimum linear filter is obtained by solving ∫1..〃・(s,σ)hσ(ちσ)4…〃・・(…)・ 2・) 陶 K_、(∫)⑧・K。。。。(f)+m。2K。。。。(∫) +1(nn(∫) where⑧and * denote convolution integral and complex conjugate, respectively, and K。。。。(f) 一51一 December 1978 Report of the Faculty of Engineering, Yamana鱒上University No.29 =Kxx(f)IG(∫)[2. w(t) and z(の are Eq.倒is in accord with the response of the con・ w(t)=aδ(t), z(t)=am(t)9(t)十n(t) (49 ventional Wiener filter when multiplicative noise respectively. Consequently, auto・and cross correla− is neglected. As this noise operates multiplicatively tion functions are on signals, signal and noise are denoted by the leaa(s,σ)=a29(s)9(σ)lemmp(s一σ)+〃。。(s,σ), ㈹ convolution integral. k、w(S,t。)=a2m。9(S)δ(t。) ㊨ If Km、m、(ア)=Mo(assumption of whiteness of respectively. Substituting Eqs.96),㈲into@1) multiplicative term), ∫:..{Zi・’・lg(・)・(・)le−(・一・)+lenn(・一・)} Km、m、(∫)⑧1(。。。。(∫) ×h。(t。一σ)dσ=α2〃2。9(S)δ(t。)・ −M・∫:..K・・x・(ゾ炸C・(・・n・・…)・ 倒 assuming the whiteness of additive and 1・恥㈲・ Then Eq. BS)reduces to multiplicative noises same as the foregoing chapter, _ 〃2。Kxx(∫)G*(ア) the impulse response of the optimum linear filter is ㈹ H。(f) m。2K。。。。(∫)+C。+Knn(f)’ h・(り一嘉袈竺1識。 ㈲ When the且uctuation of multiplicative noise is very slowly in comparison with that of signals, where the spectrum band width of a received signal is C・−1−m・∫:..・(・)h・(一・)d・・ much wider than that of multiplicative noise. Therefore Kxx(∫)is constant in comparison with The above result is in accord with Eq. a])except 1(m、7π1(∫). Consequently aCOnStant nUmber. 1(殉殉(∫)⑧1(。。。。(∫)=t・a.、2・K。。。。(!) 4.3 0PTIMIZATION FOR PAM SEQUENCE Then the transfer f皿ction of the optimum linear In this chapter we deal with PAM sequence as an contact point of analog and digital transmision filter is systems. Since this system is denoted by a periodic m。・臨。(f)G*(ゾ) ㈹ H。(ゾ)at (σm、2+m。2)K。。。。(∫)+K。。(ゾ) stationary process, Eq.㈱is written as where ∫°° 6・) ・・、2−「:..Km、・1(∫)4ゾ・ pulse一 where i is an arbitrary integer and T is a v 4.2 0PTIMIZATION FOR SINGLE PULSE period. The Fourier transform of Eq.輌is Now we consider the impulse response or transfer ∫:..H・*(・)・x・(一ノ2・・iT)Bz2(f・ y)d・ function of the optimum linear filter for an isolated pulse over transmission line. We decide Eq.⑳as a starting Point of this analysis since a non・ stationary system is delt in this chapter. Provided =C、w(f, iT) 61) where C,w(ゾ, iT) 合「°°le、w(・,の・x・(一元2π∫・)ds. t=ちin Eq.佗6), its Fourier transform is 62) レー◎◎ ∫:..k・・(・,・)h・σ一)d・−le・・(・・t・)・ ⑪ PAM sequence at the receiver input is x(t)=Σ靱(t−kT) ∫:..H・*(・)・xp(一ノ2・…)B・・(∫・・)d・−C・・(〃・) 63) 虎 where ② E[ale]=δ. where E[akak+m]=α況=α_m for all〃, Bzz(f,レ) ㌶1㌫∴(り.} 全∫:..∫:le・・(…)・x・[一元2・(ゾ・一・・)]d・d・蜘 64 Ca・(〃・)全∫:..le・・(・・t・)・xp(−」2・ゾ・)⊇ Auto・and cross correlation functions of Since a transmitting signal x(り is x(t)=αδ(り, w(t)are 一52一 z(りand An Optimum Linear Receiver for Transmission Systems le、、(s,σ)Σα↓Σσ(s−leT)9(σ一 t k (le+1)T)lemm(s一σ)+le。n(s一σ), 6S) 編(s, iT)ニ〃z。Σ ev、..、9(s−kT). 66) k Using the Poisson sum formula, Bzz(ゾ,レ)is B、z(f,レ) 一翠δ( 1レーf−’6’)∫:。K−(ゾーξ)G(ξ)G・(∫÷・) which Knn(f)and Km、m1(f)⑧{[G(f)12Z)(f)} are additive and multiplicative noise spectrum densities, respectively. Consequently we know that the optimum linear filter transfer function can be expressed with only power spectral densities of signal and noises same as the conventional case. The multiplicative noise term in Eq.㈹contains aconvolution integra1, then we reunderstand the ×L)(f一ξ一レ)dξ十δ(f一μ)Knn(∫). 67) multiplicative effect between signal and noise, and The other hand, Caw(f, iT)is the signal dependency of noise in this transmission Czw(∫, iT)=moTG(f)D(f)exp(一ノ2πiTf)6S) where T」り(ア)=Σ d、exp(一プ2π2Tプ). 69) i Substituting Eqs.67),6S)into Eq.6]) system. [Example 2] Here we assume that noise is white in return for a looser Nyquist condition than Example 1, i. e., ¥H・*(ゾー⊥)∫:..K−(f一ξ)G(ξ)G・(ξ一 1(。,、(f)=ノV。,1(叩、(∫)=M。 ∫:..{G(ノ)㎡D(∫)}・IG(ゾー÷)v/D(f−f)}df ÷)D(ξ)dξ一[一・H・*(f)Knn(f)一・TG(ゾ)D(∫)・ =0 (片0) ㈹ 陶 If the difference equation of Eq.(60)can be solved generally, the optimum linear 丘lter transfer function of this system is obtained. Unfortunately, we can not generally solve this equation except examples restricted with some conditions、 Two specific examples of solutions of Eq.㈹restricted Two integrands in the above equation denote to be orthognal each other at 1=0. A solution of this equation is obtained heauristically as H。(ア) m。TG*(f)D(ゾ) 閾 N・+m・2D(f)翠G(f−÷)2 ’ with some conditions are shown following. [Example 1] The transmission line is assumed to be limitted パco +M。 D(∫)|G(f)12∂∫ ゾ ーe◎ We can ccmposite both transfer functions of Eqs. by the Nyquist band, that is, G(f)≡o,1ゾ1>1/2T 圃 Substituting Eq.圓into Ep.6S), we get Ho(f) ㈹and㈹with a cascade conection of a matched filter and a transversa1丘lter. As an example, one configuration of Eq.㈹is shown in Fig.8. m。TG*(ゾ)D(ゾ) 聞 Knn(∫)+Kmm(f)(釧G(∫)i2D(f)}° By means of rewriting Kmm(f), the required transfer function is ・・卿/〔・8・岬・σ一丁)1・冊M・.ゆσ) ×IG(∫)12明△ΣC。ei27「VfT z(t) H。(f) m。TG*(f)D(f) ㈹ K。n(∫)+m。21G(∫)121)(∫) ’ +1(剛、(ゾ)(釧G(∫)12D(ゾ)} y(t) When the system contains additive noise only, Eq. Σ 〉一一→ 綱is sampling at t=IT H・(f)−K。。;C瑠1{;(f) (・4 (1・・;・O,±1,±2,…) which is in accord with the conventional result8). In Eq.⑭, if we rewrite Knn(∫)with Knn(f) 十Km、m、(∫)⑧{IG(f)12Z)(∫)}we obtain Ep.倒, in −53一 T C−h Fig.8 Structure of optimum filter on Eq.66 December 1978 Report of the Faculty of Engineering, Yamanashi University No.29 1ate Dr. Pro Kosaku Aikawa of Yamanashi U., 5. SU]MMARY Dr. Pro. Shigeo Tsujii, Mr. Takashi Yamamoto, The impulse responses or transfer functions of Mr. Susumu Nakamori of Tokyo Institute of the optimum linear filter are obtained for criteria Technology, Dr. Kazuo Kamata of Utsunomiya of SNR in digital transmission systems or of mean・ U.,and Dr. Pro. Kazuo Horiuchi of Waseda U., SqUare errOr in analOg tranSmiSSiOn SyStemS. who was so kind as toexplain me for his papers. Consequently, we known, in digital transmission REFERE]NCES systems, the optimum linear filter impulse response is a particular shape with dent at the top of a 1) Investigation of inforrnation and control,2, P. responses of systems are computed for various ratios among additive, multiplicative noise and K.Horiuchi and M. Amano;“Generalized丘1ters for rejection of nonlinearly coupled noises”, waveform, and we explain it qualitatively. Some 23 (1964.02). 2) Painter and Gupta;“Recursive ideal observer intersymbol interference. detecti°n°f kn°wn M’a「y signaals i・m・1>ipli’ In analog communication systems, the transfer 梛 簿 functions of the optimum Iinear filter are shown, cative and additive gaussian noise”,IEEE Trans. Com. COM・218, P.94(Aug.1973). 3) Prassad and Mahalanabis;“On the estimation and their characteristics are computed for some of gaussian signals in multiplicative channels” practical or particular examples. Arch. Elektron&Ubertraguns. tech.,28,9, P. 387 (Sept.1974). Apart from the question of whether an analysis 4) developed in this paper can be apPlied for the linea「ity to automatic gain control”, IEEE general system containing noise depending on signals or not, this analysis may be available to understand Stochham;“The application of generalized Trans. AU−1阜2, p.267(June 1968). 5) Lohmann;“Image formation and multiplicative noise”, J. Opt. Soc. Am,55,8, P.1030(Aug. for a f皿damental tendency of the optimum linear 1965). system with such noises. 6) S.Tsujii, M. Takahara and T. Yamamoto; Hereafter problems for some practical systems “Optimum receiver for digital signal with and for the realization of filter should be discussed. multiplicative noise, additive noise and inter− symbol interference”IECE Tranc Tras.,59・A, Shot noise in optical communication systems, pro’ blems of which may be distinguished from those 9,p.756(Sep.1976). 7) S.Tsujii, M. Takahara and K. Kamata;“On of this paper, is one of noises depending on signalsg). waveform equalization and its economical profit Therefore these results in this paper may be in optical丘ber PCM transmission systems”, IECE Trans.,58西A,11, P.683(Nov.1975). applied for a certain problem in those systems. 8) L.E. Franks;“Signal theory”, Prentice・Hall 9) T.Taki, M. hadori and Y, Arakawa;“The We hope to be available these results for more. general systems containing noise depending on signals such as the fading channels, the image (1969). noise equivalent circuit of the optical com− munication receiver system and the optimum tranSmlSS10n SO On. design of the linear receiver”. CS 76−156, IECE of Japan(dec.1976). ACKNOWLEDGEMENT The auther wish to express his thanks to the 一54一
© Copyright 2026 ExpyDoc