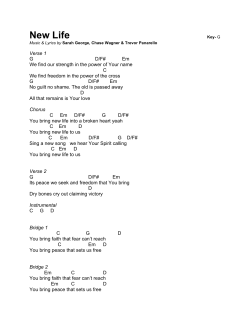
Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014 Porto, Portugal, 30 June - 2 July 2014 A. Cunha, E. Caetano, P. Ribeiro, G. Müller (eds.) ISSN: 2311-9020; ISBN: 978-972-752-165-4 Performance Verification for Railway Extradosed Bridges by Dynamic Interaction Analysis Masamichi SOGABE1, Tsutomu WATANABE1, Keiichi GOTO1, Munemasa TOKUNAGA1 Makoto KANAMORI2 and Shinichi TAMAI2 1 Railway Dynamics Div., Railway Technical Research Institute, 2-8-38 Hikari-cho, Kokubunji-shi, Tokyo, Japan 2 Japan Railway Construction, Transport and Technology Agency, 6-50-1 Honcho, Naka-ku, Yokohama City, Kanagawa, Japan email: [email protected] ABSTRACT: In recent years, PC extradosed bridges have been widely used for long road bridges featuring practical and economical structures. In this study, we discuss the applicability of 4-span continuous PC extradosed bridges (bridge length 450 m, span length 75 + 150 + 150 + 75 m) to high-speed railways through the analysis of dynamic interaction between vehicle and structures. As a result, we clarify that when the designed maximum speed is 360 km/h (1) a structure design impact factor of 0.35 guarantees safety with respect to resonance, (2) a car axle load decrease ratio of 9.0% shows no problem related to running safety and (3) a car acceleration of 0.44 m/s2 ensures high-level ride comfort KEY WORDS: PC extradosed bridge; Dynamic interaction; Impact factor; Running safety; Ride comfort. 1 INTRODUCTION In this study, we discussed the applicability of a four-span continuous PC extradosed bridge (bridge length 450 m, span length 75 + 150 + 150 + 75 m) to high-speed railways. The 150 m span length of the bridge is the longest among the Shinkansen concrete bridges in Japan [1]. Figure 1 shows the outline of the PC extradosed bridge. This bridge is used as a double-track railway bridge with 3 box section main girder which is stayed by diagonal cables in two planes, simply supported at the ends and rigidly connected with main towers. In recent years PC extradosed bridges have been widely used for long road bridges featuring, practical and economical structures, and already built as railway bridges having a span length of about 100 m. However, their dynamic characteristics for high-speed train operation have yet to be clarified. Under these circumstances, therefore, we now shall address the following subjects specific to railways. PC extradosed bridges are high-order indeterminate structures composed of members with different characteristics, such as main girders, main towers, bridge piers and diagonal cables. This means that we must clarify the dynamic loads (values of impact factor) caused by high-speed train operation on various members [2]. Furthermore, long extradosed bridges tend to cause large degrees of deformation and have low-frequency vibration modes close to the natural frequency of car bodies, in the vertical direction. Therefore, we must clarify the running quality (that is, running safety and ride comfort) of high-speed vehicles with respect to the dynamic deformation of the main girders [2]. In this study, we discuss the above problems using the Dynamic Interaction Analysis for Shinkansen Trains And Railway Structures (DIASTARS), a program for analyzing the dynamic interaction between vehicles and railway structures [3] as well as establish a system for visualizing the analytical results by applying existing computer graphics technologies and understand the dynamic behaviors from animations. 2 ANALYSIS METHOD 2.1 Vehicle dynamic model Figure 2 and Table 1 show a vehicle dynamic model. The vehicle model was created by connecting each element of a vehicle body, two truck frames and four wheelsets which were modeled as rigid masses with springs and dampers. Then, a vehicle has 31 degrees of freedom. The actual vehicle has stoppers between each element part to control significant relative displacement. In order to consider this, bilinearnonlinear springs were used for springs. In the analysis, we used 8 or 12 coached trains. Adequacy of these dynamic models has already been verified through running tests on the actual bridges and vibration experiment using a vehicle test plant and an actual vehicle model [4] ,[5] ,[6]. Vehicle specifications were assumed in reference to a recent high-speed Shinkansen train vehicle. The main input data were 25m of vehicle length, 40.0t of body mass, 3.3t of truck frame mass, 2.0t of wheelset mass, 300kN/m of vertical spring constant for the air-spring (half side of one truck), 30kN/s・m of damping constant for the air-spring (half side of one truck), 1300kN/m of spring constant for the axle spring (half side of one wheelset), and 40kN/s ・ m of damping constant for the axle spring (half side of one wheelset). Equations of motion of the vehicle system in the vehicle coordinate system can be shown as equation (1) after transposing nonlinear spring terms between each element to the right-hand side. M V X V C V X V K V X V FLV FV ( X V , X B ) FNV ( X V ) (1) where affixing character V and B were the vehicle and the bridge, respectively; X V was a displacement vector of the vehicle; M V , C V and K V were the mass, damping and stiffness matrices of the vehicle, respectively; F LV was load vectors of the wind pressure; FV ( X B , X V ) was interaction load vectors with the bridge; FNV ( X V ) was load vectors of the nonlinear spring force of the vehicle model assumed outside load. 1203 Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014 150m 1st Main tower 150m 2nd Main tower 3.8m 6.5m P1 10m×4m P2 22m 22m 40m 8.0m 10m×5m P3 Φ14.1m 75m 3rd Main tower 10m×4m P4 20.0m 19.5m 17.5m 75m 40m P5 Side view P2Cross-section Figure 1. Outline of PC the extradosed bridge. Table 1. Notations of vehicle dynamic model. Not. Half of lateral distance between contact points of wheel and rail Half of lateral distance between yaw dampers Half of lateral distance between axle springs Half of lateral distance between air springs Height of center of gravity of car body from rail head Height of center of gravity of truck from rail head Vertical distance between center of gravities of wheelset and car body Vertical distance between center of air spring and center of gravity of car body Vertical distance between center of gravity of truck and center of air spring Nominal radius of wheel Half of length of car body b L a b0 b1 b2 Hb HT h1 h2 hs r Lc Items Half of mass of car body m Half of inertial moment of car body around x axis Half of inertial moment of car body around y axis Half of inertial moment of car body around z axis Mass of truck Inertial moment of truck around x axis Iy Iz MT ITy Inertial moment of truck around z axis ITz Mass of wheelset Mw Inertial moment of wheelset around x axis Inertial moment of wheelset around z axis Bridge dynamic model Ix ITx Inertial moment of truck around y axis Figure 3 shows an analytical model of the bridge. DIASTARS can model structures of any type using beams, trusses, shells, solids, springs and other finite elements. We modeled all main girders and bridge piers with girder elements, while assuming that their rigidities are all linear (average weight of main girders: 600kN/m, cross-section area: 13 to 98m2, second moment of area: 29 to 544m4). We also modeled diagonal cables with truss elements and connected them to the main girder with a rigid beam installed to the diagonal steel cable anchoring points. In the connecting areas between main girders, main towers and piers, we assumed an appropriate rigid zone for each member. The main girders are simply supported on bridge piers P1 and P5. Each pier is fixed at the bottom end. The analytical model has 5,040 nodes and 7,085 elements in total. We applied a damping ratio of 0.7% in all modes by referring to the measurement made at PC cable-stayed railway bridges [6]. 1204 Not. Iwx Iwz Items Longitudinal spring constant for air spring (half side of one truck) Longitudinal damping constant for yaw damper (half side of one truck) Lateral spring constant for air spring (half side of one truck) Damping constant for lateral damper (half side of one truck) Vertical spring constant for air spring (half side of one truck) Vertical damping constant for air spring (half side of one truck) Longitudinal spring constant for wheelset (half side of one wheelset) Lateral spring constant for wheelset (half side of one wheelset) Vertical spring constant for axle spring (half side of one wheelset) Vertical damping constant for axle damper Static wheel force z Body φ Truck frame Wheelset Air spring zT ψT φT Axle spring zW ψW φW Wheelset Kwy Kwx Truck frame Body Not. K1 C1 K2 C2 K3 C3 Kwx Kwy Kwz Cwz Ps z φ ψ θ y zT Coupler K3, C3 θT φT zW Kwz, Cwz φW K1 , C1 Force 2.2 Items Half of longitudinal distance between center pivots of fore and rear truck Half of wheelbase K2 , C2 θW yT yW Displacement Non-linear spring (stopper) Non-linear spring Damper Figure 2. Vehicle dynamic model. The axle load variation ratio of the vehicle is affected by the curvature of the wheel running surface (that is, the rail top curvature in the longitudinal direction). The deflection of girders causes angular rotations with an infinite curvature at their ends. In this study, however, we modeled the track Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014 Rail Rigid beam to cable anchoring points Rail pad Diagonal steel cable: truss element Girder Angular rotation Tower: beam element Main girder: beam element Rail: beam element Rail pad: spring (3DOF) Connecting areas: assumed an appropriate rigid zone Rigid beam to rail support points Simple support P5 Train running P4 Z Y P3 P2 Simple support Main girder: beam element Pier: beam element X P1 Main tower: beam element Pier bottom: fix Global coordinate Figure 3. Bridge dynamic model. B B B B B B L B V B B N B (2) where X B was a displacement vector of the bridge; M B , C B and K B were the mass, damping and stiffness matrices of the bridge, respectively; FLB was a load vector of earthquake or wind pressure of the bridge; FB(XV , XB) was an interaction load vector with vehicles; FNB ( X B ) was a load vector of the nonlinear spring force of the bridge model assumed outside load. 2.3 2.3.1 Rail Rail displacement zR Relational displacement between the wheel and the rail δz wheel Track irregularity ey Tread gradient γ Figure 4 shows the vertical dynamic interaction model between the wheel and the rail. The vertical relative displacement δz between the wheel and the rail can be shown as equation (3). δz Wheel jumping Figure 4. Vertical interaction model between wheel and rail. Interaction model between the wheel and the rail Vertical direction Wheel displacement zw Hertz contact spring Contact force H Track irregularity ez Initial radius r Rail displacement yR Rail Relational displacement between the wheel and the rail flange δy Flange Rail tilting spring constant kp Wheel Friction force Creep force Qc Flange force Qf Wheel displacement yw Flange force Qf M X C X K X F F ( X , X ) F ( X ) B Wheel Creep force Qc structure by rails elastically supported with track pads so that the angular rotation can be eased, as shown in Fig. 3 [5]. Equations of motion of the bridge system can be shown as equation (2) after transposing nonlinear spring terms to the right-hand side. Rail gap :u Slip ratio S gap :u δy Figure 5. Horizontal interaction model between wheel and rail. δz= zR – zW + eZ + eZ0(y) (3) where zR and zW were vertical displacements at the contact point of the rail and the wheel; eZ was vertical track irregularity existing on the rail shown in Fig. 4; eZ0 was the amount of change of the wheel radius between the current contact point and the initial contact point, which was shown as a function of horizontal relative displacement y between the wheel and the rail. A contact point s and contact angle a for the relative displacement δz were calculated with the horizontal relative displacement y of the wheel and the rail and the contact function set in accordance with geometric shapes of the wheel and the rail. When the wheel and the rail consist of a quadratic surface respectively, the relation between the relative displacement δ of the wheel and the rail of the normal direction of the contact surface and the contact force H can be shown with the Hertz contact spring, as indicated in equation (4). H = H(δ) = H(δz・cos a ) (4) The vertical and horizontal components of this contact force H were distributed to the wheel and the rail respectively to make the interaction force. 1205 Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014 Mode 1 0.95Hz Mode 2 1.04Hz Mode 3 1.11Hz Mode 4 1.23Hz 4.0 6.0 8.0 10.0 Time(sec) (a) Main gerder center displacement 6 4 2 0 -2 -4 -6 0.0 2.0 1st tower 2nd tower 3rd tower 8.0 10.0 2.0 4.0 6.0 Time(sec) (d) Tower top displacement -10000 1st span 2nd span 3rd span 4th span 0 10000 20000 0.0 2.0 4.0 6.0 8.0 10.0 Time(sec) (b) Main girder center bending moment 4000 2000 0 1st tower -2000 2nd tower -4000 3rd tower 0.0 2.0 4.0 6.0 8.0 10.0 Time(sec) (e) Tower base bending moment Normal tension force(kN) 3rd span 4th span Bending moment(kN-m) 1st span 2nd span Bending moment(kN-m) 10 0 -10 -20 -30 0.0 Bending moment(kN-m) Rail direction displacement(mm) Vertical deflection(mm) Figure 6. Natural frequency modes. 1st en trance side 11 th entrance sid e 100 11th exit side 1st exit side 50 0 0.0 4.0 6.0 8.0 10.0 Time(sec) (c) 2nd tower cable normal force 15000 10000 5000 0 -5000 -10000 -15000 0.0 2.0 2.0 P 2 pier P 3 pier 8.0 10.0 P 4 pier 4.0 6.0 Time(sec) (f) P ier bottom bending moment Figure 7. Time history response waveforms of the bridge (single-track loading by 8-car train running at 360 km/h). 2.3.2 Horizontal direction Figure 5 shows the horizontal dynamic model. The horizontal relative displacement δy between the wheel flange and the rail can be shown as equation (5). δy = y– u (δz) = yw – yR – ey – u (δz) (5) where y was the horizontal relative displacement between the wheel and the rail; yR and yW were horizontal displacements at the contact point of the rail and the wheel; ey was horizontal track irregularity existing on the rail shown in Fig. 5; u(δz) was the gap between the wheel flange and the rail which was shown as a function of vertical relative displacement δz. A contact point s and contact angle a for the relative displacement δy were calculated with the vertical relative displacement δz of the wheel and the rail and the contact function set in accordance with geometric shapes of the wheel and the rail. When δy<0, it was considered that the wheel flange and the rail were not in contact. In this case, creep force Qc (slipping force) acted horizontally on the contact surface of the wheel and the rail. The creep force was the horizontal force caused by creep of the wheel moving forward by rolling on the rail, which can be shown as equation (6). This creep force reached the upper limit of friction force when the slip ratio became high. Qc C S y C ( yw r w v w ) / v (6) where C was the creep constant; Sy was the slipping ratio in the horizontal direction; v was the train speed; r was the nominal radius. 1206 When δy≧0, it was considered that the wheel flange and the rail were in contact. For the flange contact, only the flange pressure Qf which was equivalent to the horizontal component of contact force H was considered. The flange pressure Qf can be shown as equation (7) using the rail tilting spring constant kp. Qf = kp・δy 2.4 (7) Numerical analysis method Equations of motions of the train and the bridge shown as equation (1) and (2) were solved in the modal coordinates for each time increment t by the Newmark time difference scheme. Since the equations were nonlinear, iterative calculations were necessary during each time increment until the unbalanced force between the train and the railway structures became small enough to be within the specified tolerance [3]. 3 3.1 ANALYSIS RESULTS Impact factors Figure 6 shows the natural frequency modes obtained through eigenvalue analysis. A symmetric primary vibration mode at 1.04 Hz and an anti-symmetric secondary vibration mode at 1.23 Hz exist close to the vertically anti-symmetric primary vibration mode at 0.95 Hz. Figure 7 shows the time history response waveforms of the bridge under single-track loading by an 8-car train running at 360 km/h. In Fig. 7(a), the waveforms present an approximately static behavior generated by the moving load or a quasi static behavior slightly affected by the dynamic effect of the natural vibration. The main girders are of the Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014 200 300 400 Train speed(km/h) (a) Main girder center vertical displacement 1st tower 2nd tower 3rd tower 100 200 300 400 Train speed(km/h) (d) Tower top rail direction displacement 0.5 0.4 0.3 0.2 0.1 0.0 Impact factor 1st span 2nd span 3rd span 4th span 200 300 400 Train speed(km/h) (b) Main girder center bending moment Impact factor Impact factor 0.6 0.5 0.4 0.3 0.2 0.1 0.0 100 0.5 0.4 0.3 0.2 0.1 0.0 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.0 100 1st tower entrance/exit side sway ing 2nd tower entrance/exit side sway ing 3rd tower entrance/exit side sway ing 0.6 0.5 0.4 0.3 0.2 0.1 0.0 Impact factor 1st span 2nd span 3rd span 4th span Impact factor Impact factor 0.5 0.4 0.3 0.2 0.1 0.0 100 200 300 400 Train speed(km/h) (e) Tower base bending moment 1st entrance side/exit side 4th entrance side/exit side 8th entrance side/exit side 11th entrance side/exit side 100 200 300 400 Train speed(km/h) (c) 2nd tower cable tension force P2 pier entrance/exit side sway ing P3 pier entrance/exit side sway ing P4 pier entrance/exit side sway ing 100 200 300 400 Train speed(km/h) (f) Pier bottom bending moment 0.6 0.4 0.2 0 -0.2 -0.4 -0.6 0.0 2.0 4.0 6.0 8.0 10.0 Time(sec) (d) 1st car body acceleration 4.0 6.0 8.0 10.0 Time(sec) (b) 4th car wheel load variation 0.6 0.4 0.2 0 -0.2 -0.4 -0.6 0.0 At front truck At rear truck 2.0 4.0 6.0 8.0 10.0 Time(sec) (e) 4th car body acceleration Wheel load variation(%) Reduction due to change of ang le 2.0 6 4 2 0 -2 -4 -6 0.0 1st wheelset 3rd wheelset 2.0 4.0 6.0 8.0 10.0 Time(sec) (c) 8th car wheel load variation 2 At front truck At rear truck 1st wheelset 3rd wheelset Car body acceleration(m/s) 4.0 6.0 8.0 10.0 Time(sec) (a) 1st car wheel load variation Wheel load variation(%) 2.0 6 4 2 0 -2 -4 -6 0.0 2 1st wheelset 3rd wheelset Car body acceleration(m/s) 6 4 2 0 -2 -4 -6 0.0 2 Car body acceleration(m/s) Wheel load variation(%) Figure 8. Relation between train speed and impact factor of the 12-car train case. 0.6 0.4 0.2 0 -0.2 -0.4 -0.6 0.0 At front truck At rear truck 2.0 4.0 6.0 8.0 10.0 Time(sec) (f) 8th car body acceleration Figure 9. Time history response waveforms of the train (single-track loading by 8-car train running at 360 km/h). double-plane suspension type, so the maximum rotational angle due to the torsion of the girders under one-line loading is as small as 10-5 rad, with the main towers and diagonal cables on the left and right sides presenting almost symmetric behaviors. Figure 8 shows a relation between the train speed and the impact factor of a 12-car train case. The impact factor i is the ratio of the increment of the dynamic deflection or the section force caused by the running train to their static values as expressed by equation (8) [2]. i = (fd – fs) / fs (8) where fd were dynamic deflection or section force; fs were static deflection or section force. The impact factor, which depends on the kind of member and section force, tends to increase as a whole as train speed increases without significantly high resonance peaks. Although not shown in the figures, a 12-car train gives a slightly larger impact factor value than by an 8-car train. To calculate the value of the design impact factor to be applied to the bridge, we first summarized the analytical results on the values of impact factor effected by 8- and 12-car trains, without including the components by the bending moment of the main towers (having sectional dimensions determined by verifying the earthquake resisting performance) and then added the component effected by track irregularities to the resultant value [2]. As a result, we obtain 0.35 as the value of the design impact factor to be applied to the bridge. 3.2 Train running quality Figure 9 shows the time history response waveforms of the train under single-track loading by an 8-car train running at 360 km/h. It was clarified that car body acceleration presents a sinusoidal wave at a frequency equal to the ratio of train speed to span length, the axle load variation ratio is analogous to car body acceleration, so axle load variation are mostly caused by car body acceleration, and the axle load decreases are caused by the angular rotations at the girder ends of the bridge entering point [5], [6], [7]. The main girders are not twisted, so the lateral force was no more than 0.5 kN. Figure 10 shows a relation between the train speed and train running quality. We evaluated running safety, an item in the train running quality, in terms of the axle load reduction ratio (the axle load variation ratio on the negative side). We verified running safety under the condition of simultaneous double-track loading in two directions at the maximum seatload factor (with passengers 3.5 times as many as the passenger capacity on board) according to the railway structure design standard and commentaries (limit of 1207 20.0 15.0 (max. load ) 10.0 5.0 Lim it 37% 0.0 2 100 200 300 400 Train speed(km/h) (a) Wheel load reduction rate (8 car train) 1st car 1.0 3rd car truck 5th car Single loading 7th car (capacity load) Wheel load reduction rate(%) 1st car 3rd car 5th car Double truck 7th car loading Car body acceleration(m/s) 2 Car body acceleration(m/s) displacement). We set the limit value of the axle load reduction ratio at 37% [8]. This limit value of structure displacement is set to guarantee that cars don’t reach the criteria for running safety, even when track irregularity exists on a bridge. Figures 10(a) and 10(b) show that the axle load reduction ratio tends to increase as train speed increases; for example, 9.0% at a train speed of 360 km/h. This value has an ample margin with respect to the limit value of 37%. We evaluated ride comfort, the other item pertaining to train running quality, in terms of the maximum car body acceleration directory above the trucks. We verified ride comfort in running under the condition of single-track loading at the rated seat-load factor with the limit value of car body acceleration set at 2.0 m/s2, according to railway structure design standards and commentaries (limit of displacement) [8]. Figures 10(c) and 10(d) show that the maximum car body acceleration tends to increase as train speed increases; for example, 2.0 m/s2 at a train speed of 360 km/h. This value has an ample margin with respect to the threshold value of 2.0 m/s2. Wheel load reduction rate(%) Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014 2 0.5 Limit 2.0m /s 0.0 100 200 300 400 Train speed(km/h) (c) Car body acceleration (8 car train) 20.0 15.0 10.0 1st car 3rd car 5th car 7th car Double truck 9th car loading (max. load ) 12th car 5.0 Limit 37% 0.0 100 200 300 400 Train speed(km/h) (b) Wheel load reduction rate (12 car train) 1st car 1.0 3rd car 5th car Single truck loading 7th car (capacity load ) 9th car 0.5 12th car 2 Lim it 2.0m/s 0.0 100 200 300 400 Train speed(km/h) (d) Car body acceleration (12 car train) Figure 10. Relation between train speed and train running quality. 4 ANALYSIS VISUALIZATION Various time history data for infinitesimal increments calculated by the direct integral method are normally too large in volume, so it is extremely difficult to grasp all analytical results and appropriately understand their dynamic behaviors. Therefore, we established a system for DIASTARS to visualize their dynamic characteristics, by applying the existing computer graphics technologies. Figure 11 shows an outline of the visualization system. In the recent film industry, development in CG (Computer Graphics) technology has advanced significantly, and the technology is becoming available with ease. Therefore, we tried to make the most of the existing CG technology to establish the visualization system. We created new modules to make a motion capture of analytical results, perform conversion to the coordinates in the visualizing space and adjust the enlargement ratio of responses, while, combining several existing modules, we created objects of vehicle and structures, arranged these objects in a visualizing space, set cameras, specified light sources, rendered pictures and compressed images. Figure 12 shows a vehicle rigid object model. As mentioned earlier, in DIASTARS, component elements such as a vehicle body, a truck and a wheelset were considered rigid masses, which were connected with springs and dampers. Therefore, the analysis results can be presented as a sixdegree-of-freedom response of a rigid object (running at a constant speed in the rail direction). Normally, a method of presenting the element mesh as an ordinal wire frame is common in dynamic analysis visualization with the commercial based finite element method. In this study, we decided to separately create geometry data based on the actual vehicle and express each rigid masses with shading display (removal of black lines, shade and shadow, region fill) due to each vehicle’s component element being rigid masses. The vehicle configuration was created by statically combining polygon (square surface elements). In addition, 1208 Dynamic analysis Create object DIASTARSⅡ Bridge time series data ・polygons ・Shading Vehicle time series data Motion capture Rendering To capture result motions of analysis results To convert to visualized space coordinates To adjust response enlargement ratios Figure 11. Outline of the visualization system. (a)Polygon model (b)Shading model Figure 12. Vehicle dynamic model Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014 (a)Vibration behavior of bridge (b)Vibration behavior of vehicle Figure 13. Example of visualization of the analysis results (single-track loading by 8-car train running at 360 km/h). Target 非線形ばね (ストッパ) Video camera 10.0 5 20.0 30.0 Time(sec) (a) 2nd span 4th test f=1.43Hz 5th test f=1.33Hz 6th test f=1.39Hz 0 -5 -10 0.0 2 10 0 10 -1 10 -2 10 -3 1 2 3 Frequency(Hz) 10 0 10 -1 10 -2 10 -3 20.0 30.0 1 2 3 Frequency(Hz) Time(sec) (b) 3rd span (a) Time history response waveforms of main girder deflection -25.0 -20.0 -15.0 -10.0 -5.0 0.0 10.0 Powerr spectrum (mm /Hz) -5 2 0 -10 0.0 Vertical deflection(mm) 1st test f=1.31Hz 2nd test f=1.34Hz 3rd test f=1.34Hz 5 Powerr spectrum (mm /Hz) Vertical deflection(mm) Figure 14. Video-type displacement sensor. Vertical deflection (mm) the color specified texture (image data) was attached on the surface of each polygon to create the object. The vehicle object model in the figure consists of each rigid object such as a vehicle body, a truck and a wheelset with a total of 3521 pieces of polygons for each vehicle. To express texture of the object surface, characteristics such as environment light, glazing, reflection, transparency and shadow were specified to match the material set of each polygon. The bump (bumpy) method with texture was used for the details of the window and the door instead of using polygons in an attempt to decrease burdens on drawings. As explained above, in DIASTARS, the bridge model was created with finite elements such as beams, tresses, shells and solids, whose response analysis results are provided momentary by node displacement. As for visualization, since all finite element node behaviors are not always required, the entire structural behavior was expressed by connecting created rigid objects with selected representative nodes. In this study, the main girder was divided into rigid objects of 5m. A model of the main girder was created with beam elements in numeric analysis. In contrast, a rigid body model was created with polygon in the same way as the case of the vehicle. This object behavior is presented by displacement time history data of the centric position node in a section of 5m. With the established motion capture modules, the displacement response history obtained by DIASTARS was converted into rigid object motion data in the visualization space coordinate. However, real behaviors of the vehicle and the structure are minute compared with the entire structure size. For this, the response needs to be enlarged by a constant fraction in order to understand dynamic behavior. Therefore, arbitrary enlargement factors were made to be specified for the displacement and the rotating angle during the process of converting than into visualization space coordinate. After allocating each object in the visualization space and specifying motion data for each, camera setting, light source specification, and background image were determined in reference to the simple rendering. The rendering was performed in 30fps (frame per second), and final movie files were created with image compression in the frame and the time direction. Analysis (8-car train) 1st span 2nd span 3rd span 4th span Running test (12-car train) 2nd span 3rd span Static Axis load =110kN 100 200 300 400 Train speed (km/h) (b)Relation between vertical deflection and train speed Figure 15. Validation result of the actual train running test. 1209 Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014 Figure 13 shows an example of visualization of analysis results of the single-track loading by an 8-car train running at 360 km/h. Figure 13(a) shows a picture of a case where the vibration behavior of the whole bridge was analyzed with a camera fixed in a three-dimensional visualizing space. Then Figure 13(b) shows another case where the vibration behavior of the vehicle was analyzed with a camera run in parallel with the vehicle. In this manner, we are able to precisely and visually grasp the behavior of the structures coupled with the vehicle as one object. 5 ANALYSIS VALIDATION In order to verify the numerical analysis results shown in Section 3, actual 10-car train running tests were conducted on actual structures. Figure 14 shows a video-type displacement sensor. Since the bridge is a long and high structure, the video-type noncontact displacement sensor consisted of a high-vision (1920 x 1080 dots) video camera and a target 150 by 150 mm in size was used to measure vertical deflection. Sampling frequency was set at 30 Hz (30 fps). In this way, we analyzed a key shape printed on the target which was set at the main girder center in each image frame of the movie, and estimated the bridge vertical deflection from the target transfer amount. The natural frequency of the bridge was calculated by using the Autoregressive moving average model (AR model) [9]. Figure 15 shows a validation result of the actual train running test. The design maximum speed of this bridge is 260km/h, however the actual train operation speed is set at about 130km/h at present because there is a terminal station near the bridge. From this figure, we can estimate that the actual bridge rigidity is 1.6 times larger than the design one and the actual natural frequency of 1.35 Hz is 1.4 times than the design one of 0.95 Hz. This increasing tendency of rigidity is the same as that observed in previous measurement [4], [5], [6] and the reasons for this are considered to be the influence of non-structural members, such as concrete used for water discharge gradients and track structure, and also the influence of the increases in the actual concrete strength and the Young’s modulus. 6 CONCLUSIONS In this study, we discussed applicability of the 4-span continuous PC extradosed bridge to the high-speed railway bridge by applying a technique for analyzing the dynamic interaction between structures and vehicles. The knowledge obtained through this study is as follows. (1) At the maximum speed of 360 km/h, the design impact factor is 0.35, which guarantees that all members and sectional force are safe with respect to resonance despite the complicated construction of the bridge. (2) At the maximum speed of 360 km/h, the maximum axle load reduction ratio is 9.0%, a value that is not problematic at all to guarantee running safety, in comparison to the limit value of 37% and the maximum car body acceleration is 0.44 m/s2, a value that is not problematic at all either, from the viewpoint of ride comfort, in comparison with the limit value of 2.0 m/s2. 1210 (3) From the actual vehicle running tests, the actual bridge rigidity is 1.6 times larger than the design one and the actual natural frequency of 1.35 Hz is 1.4 times than the design one of 0.95 Hz. REFERENCES [1] S. Tamai and K. Shimizu, The long spanned bridge for deflectionrestricted high speed rail –SANNAI-MARUYAMA Bridge-, World Congress of Railway Research, E2, USB, Lille, France, 2011. [2] Railway Technical Research Institute, Design Standard for Railway Structures (for seismic design), Maruzen, Tokyo, Japan, 1999. [3] H. Wakui, N. Matsumoto and M. Tanabe, A Study on Dynamic Interaction Analysis for Railway Vehicles and Structures - Mechanical model and practical analysis method -, Quarterly Report of RTRI, Vol. 35, No. 2, pp. 96-104, RTRI, Tokyo, Japan, 1994. [4] M. Sogabe, N. Matsumoto, M. Kanamori, T. Sato and H. Wakui, Impact Factors of Concrete Girders Coping with Train Speed-up, Quarterly Report of RTRI, Vol.46, No.1, RTRI, Tokyo, Japan, 2005. [5] M. Sogabe, A. Furukawa, T. Shimomura, T. IIDA, N. Matsumoto and H. Wakui, Deflection Limits of Structures for Train Speed-up, Quarterly Report of RTRI, Vol.46, No.2, RTRI, Tokyo, Japan, 2005. [6] M. Sogabe, N. Matsumoto, H. Wakui, M. Kanamori and T. Shiimoto, Study on Dynamic Response and Ride Comfort of a PC Multicable-stayed Bridge (Daini-Chikumagawa Bridge on Hokuriku Shinkansen Line) (in Japanese), Proceedings of Structural Engineering, Vol.44A, pp.13331340, JSCE, Japan, 1998. [7] S. Miyazaki, M. Kanamori, H. Wakui, N. Matsumoto and M. Sogabe, Analytical Study on Response and Riding Comfort of PC MulticableStayed Railway Bridge, International Conference of Speed-up Technology for Railway and Maglev Vehicles, pp.424-429, Japan, 1993. [8] Railway Technical Research Institute, Design Standard for Railway Structures (for displacement limits), Maruzen, Tokyo, Japan, 2006. [9] K. Matsuoka and K. Kaito: Variable Estimation of Bridge Frequency under Train Loads, The 31th International Modal Analysis Conference, IMAC-XXXI, CD-ROM, No.429, California, U.S., 2013.
© Copyright 2026 ExpyDoc