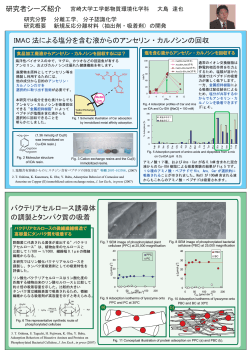
影 形 計測 :時間差 利用 位置推定 杉浦 孔明 †‡ , 松原 大輔 † , 片井 修 † † 京都大学大学院 情報学研究科 ‡ ATR 音声言語 研究所 Construction of Robotic Body Schema based on TDOA Komei Sugiura†‡ , Daisuke Matsubara† , Osamu Katai† † Graduate School of Informatics, Kyoto University ‡ ATR Spoken Language Communication Research Laboratories Abstract: This paper proposes a method that incrementally develops the “body schema” of a robot. The method has three features: 1) estimation of light-sensor positions based on the Time Difference of Arrival (TDOA) of signals and multidimensional scaling (MDS); 2) incremental update of the estimation; and 3) no additional equipment. We carried out simulation experiments in which a mobile robot moves around environments or follows another robot. Each robot has several light sensors that collect data from which cross-correlation functions are derived and the TDOA is computed. Experimental results show that our method can estimate the positions of sensors deployed on the body and identify the sensors on the same part of the body. Keywords: correlation embodiment, robotic body schema, localization, incremental mapping, cross- 1. 身体図式 ,身体 各部位 関 無意識的表象 ,模倣 空間認知 必要 考 . 近年 研究 ,身体図式 可塑性 明 [4, 7]. , 適応的 身体 持 ? 従来 研究 ,設計者 形態 関 与 多 . ,形態 変化 劣化 扱 場合 ,身体 自己組織的 獲得 望 . 背景 , 身体上 設置 位 置 推定 [3,6] , 身体図式 拡張 [5,9] 研究 行 . 他方, 位置推定 [8, 10] 位 置推定 [1, 11] ,様々 手法 提案 . , 身体図式 獲得 「身体上 位置推定」 捉 ,地表面上 身体上 置 換 ,同様 手法 利用 想像 . 本論文 ,信号到達時間差 (TDOA) 多次元尺度構 成法 (MDS) 基 , 表面 設置 位置 推定 手法 提案 . 本論文 , 「 身体図式」 相対 位置 定 義 .本手法 独自性 , 時間情報 TDOA 形 抽出 . ,位置推定 逐 次的 行 ,可塑的 身体図式 得 . 身体図式 感覚入力 構築 知 [7]. 対 本研究 , 身体図式 光 構築 . 理由 ,1) 実装 ,2) 工学的応用,3) 統計処理 , 3点 . , 身体表面上 圧力 場合,疎 生成 多 . 光 , 姿勢 変 変化 得 ,統計処理 容易 . 2. TDOA 基 設置 対 身体図式獲得 2.1 提案手法 概要 提案 手法 概略 Fig. 1 示 .本手法 2 ,Similarity Extraction Module (SEM) Incremental Mapping Module (IMM) 構成 . ,SEM 入力間 相互相関 計算 ,次 IMM 位置 逐次推定 . 本手法 特徴 , 動 従 影 利用 点 .Fig. 2 示 , 動 従 , 物体 自身 遮蔽 , 値 変化 生 .本手法 , 変化 信号到 達時間差 (TDOA) 位置 推定 . 以下 ,各 詳細 説明 行 . 2.2 Similarity Extraction Module 本 信 相互相関関数 利用 ,各 受 類似度 間 相対距離 推定 .相互相関関数 ,時系列 Xi (t) 時刻 ∆t 別 時系列 Xj (t − ∆t) 相関係数 ∆t 関数 .本研究 相互相 関関数 以下 式 定義 . Rij (t, ∆t) = Cij (t, ∆t) , Cjj (t, ∆t)Cii (t, 0) (1) 2.3 Incremental Mapping Module Sensory Data IMM 以下 式 従 ,前節 述 用 逐次更新 . Similarity Extraction Module Cross-correlation function TDOA ˆ = (1 − λ)F(t ˆ − 1) + λF(t), F(t) Relative distance (7) ˆ F(t) 相対距離行列 推定 表 . 次 ,推定 間距離 ,多次元尺度構成 法 (MDS) 用 位置 復元 .MDS , 「対 象間 類似度性 示 測度 与 ,対象 多 次元空間内 点 表 ,点間 距離 類似度 最 良 一致 点 布置 定 」手法 [2]. 各 相対位置 推定 , 設置 身体 形状認識 可能 . Incremental Mapping Module MDS Sensor positions Similarity 行列 学習率 λ Figure 1: Schematic of method Robot Robot 3. 実験: 身体形状 Robot 本節 Figure 2: Shadow casted on a robot moving left. Each triangle represents a light sensor. Cij 相互共分散関数 1 Cij (t, ∆t) = w ∆t ,以下 式 表 . w−1 t=0 (Xi (t) − X¯i )(Xj (t − ∆t) − X¯j ), (2) ¯i ,X¯j 対応 ,w 数 ,X 区間 Xi ,Xj 平均値 表 . ,時刻 t −T T 変化 最大値 Rij (∆t) 考 , ∆Tij = argmax Rij (t, ∆t), (3) ∆t fi = ∆T1i , ∆T2i , · · · , ∆Tni T , (4) ∆Tij , fi 計算 . T 定数 . 信号源 等速 移動 , fi i 他 間 信号到達時間差 (TDOA) , 間 距離 比例 .Wren 室内 人間 動 生 出 TDOA 位置 推定 行 [11]. 位置推定問題 , 位置 環境 固定 . 対 ,本論文 対象 環境 固定 場合 TDOA 位置推定 示 . 相互相関行列 R(t) 相対距離行列 F(t) 以下 定義 . R(t) = Rij (t, ∆Tij ) (i, j = 1, 2, . . . , n) (5) T F(t) = f1 f2 . . . fn . (6) ,提案手法 評価 行 実験 述 .本実験 目的 ,推定位置 誤差 定量的 比較 .実験 I-a ,移 動 用 2 次元 位置推定 行 ,I-b ,4 足 用 3 次元 位置推定 行 . 3.1 実験設定 実験 I-a Fig. 3 左図 本実験 用 (Khepera) 外観 示 .Khepera 直径 55 mm 円筒形 ,周囲 光 近接 配置 .本実験 Cyberbotics 社製 Webots 使用 . 上 ,受信 光 強度 光源 発生 光 方向 方向 内積 計算 . , 入力 10% 加 . ,本実験 , 光源 距離 考慮 光 強度 一定 . 本実験 , 行動 3 行動, (a) 回転運動,(b) 運動,(c) 障害物回避運動 用 .行動 (c) 用 環境 Fig. 3 示 .環境 1 辺 1 m 正方形 ,中 央 500 mm 上方 光源 置 .実験 用 Table 1 中央列 示 . Figure 3: Left: Schematic view of robot. Boxes represent light sensors. Right: Task environment for condition (c). 実験 I-b Fig. 4 左図 (Aibo) 環境 示 . 環境 2 m 四方 凹凸 面 ,中 央 2 m 上方 光源 存在 .簡単 ,Fig. 4 右 図 示 対称的 位置 設置 .実験 I-b , 4 足歩行 行 .実験 用 Table 1 右列 示 . 実験 I-a,I-b ,計算 削減 TDOA 計算時間間隔 10 . 10000 結果 表 .○ 配置 位置,× 本手法 得 結果 表 .図 , 数 増加 理論値 近 様子 分 . 次 ,定量的 結果 比較 ,相対誤差 Fig. 6 示 .横軸 数,縦 軸 相対誤差 , 示 10 回 平均 . z y x Figure 4: Left: Aibo and environment. Right: Sensor layout. Each sensor, deployed on the head of Aibo, is represented by a circle. Figure 5: Estimated sensor positions under condition (c). ‘o’: actual positions, ‘x’: estimated positions. Left: At 0 steps. Middle: 2,000 steps. Right: 10,000 steps. 1 (a) rotation (b) random (c) avoidance 0.8 Relative erorr Table 1: Parameters used in Experiment I 実験 I-a 実験 I-b 64 ms 16 ms 行動 数 10,000 40,000 窓 幅w 60 80 T 90 200 学習率 λ 0.001 0.001 0.6 0.4 0.2 0 0 2000 4000 6000 8000 10000 Step 3.2 評価基準 ,本実験 有効性 評価 際 用 相対誤差 説明 .本研究 間 相対距離 計算 ,推定 位置 相対的 . ,推定位置 評価 指標 必要 . i 関 実際 位置 推定位置 xi ,x ˆi . ,xi x1 除算 正規化 .次 ,xi φ = − arg x1 回転 . ,x ˆi 関 ,x ˆ1 基準 同様 操作 行 .以上 操 作 ,相対誤差 er 距離 用 以下 定義 . 1 er = n n i=1 ,n Figure 6: Experimental result I-a. Relative error of estimated sensor positions. Experiment I-b Fig. 7 相対誤差 変化 示 .相 対誤差 5000 高 ,10,000 後 0.2 収束 . ,Fig. 8 位置 推定結果 示 .図 ,0 (左図),5,000 (中央図),40,000 (右図) 推定位置 . 3.4 考察 G(− arg x ˆ1 )ˆ xi G(− arg x1 )xi − , x1 x ˆ1 数 表 ,G(φ) (8) 回転行列 表 3.3 結果 実験 I-a ,定性的 結果 一例 ,行動 b 身体図式 構成 様子 Fig. 5 示 . 左図 0 ,中央図 2000 ,右図 . 本節 本手法 獲得 身体形状 , 相対誤差 観点 考察 行 . 回転運動 , 一定 速度 定位置 回転運動 行 ,等 周期的 受信 . , 相互相関 計測 容易 行 ,早 時期 収 束 . 次 運動 場合 考 . 行動 受信 z z z y y y x x x Figure 8: Estimated positions of sensors under condition (d). ‘o’: actual positions, ‘x’: estimated positions. Left: At 0 steps. Middle: 5,000 steps. Right: 40,000 steps. 1.6 Relative error 得 (d) quadrupedal locomotion 1.4 , 1.2 徴的 1 位置 推定 比 ,外部 . TDOA 計算 .本手法 , 必要 点 特 0.8 0.6 参考文献 0.4 0.2 0 0 10000 20000 30000 40000 Step Figure 7: Experimental result I-b. Relative error of estimated sensor positions. ,早 時期 位置推定 行 不可能 . , 蓄積 更新 繰 返 ,誤差 収束 .回転運動 収束値 良 理由 , 運動 回転運動 比 直進 割合 大 ,同一 面 光源 向 時間 長 ,光 受 取 入力 変化 少 問題点 考 . ,障害物回避運動 運動 同 様 収束 様子 分 . ,障害物 回 避 行動 制限 , 運動 同様 値 収束 . Fig. 6 Fig. 7 比較 ,(d) (a) (c) 比 誤差 最 大 . ,Aibo 顎 下 設置 変化 少 .本 手法 ,時系列 変化 間 時間差 (TDOA) 計算 , 変化 .Fig. 8 当 該 実際 位置 離 場所 推定 . 4. 安価 用 構築 ,生物学 貢献 形態 変化 適応性 有 , , 得 身体 適応的幾何 工学, .特 , ,身体 関 重要 .本手法 ,光 [1] Bulusu, N., Heidemann, J. and Estrin, D.: GPSless Low Cost Outdoor Localization For Very Small Devices, IEEE Personal Communications Magazine, Vol. 7, No. 5, pp. 28–34 (2000). [2] Kruskal, J. B. and Wish, M.: Multidimensional Scaling, Sage Publications (1978). [3] Kuniyoshi, Y., Yorozu, Y., Ohmura, Y., Otani, T., Nagakubo, A. and Yamamoto, T.: From Humanoid Embodiment to Theory of Mind, Embodied Artificial Intelligence, pp. 202–218 (2004). [4] Maravita, A. and Iriki, A.: Tools for the body (schema), Trends in Cognitive Sciences, Vol. 8, No. 2, pp. 79–86 (2004). [5] Nabeshima, C., Lungarella, M. and Kuniyoshi, Y.: Timing-Based Model of Body Schema adaptation and its Role in Perception and Tool Use: A Robot Case Study, Proceedings of ICDL-05 , pp. 7–12 (2005). [6] Pierce, D. and Kuipers, B.: Map Learning with Uninterpreted Sensors and Effectors, Artificial Intelligence, Vol. 92, pp. 169–229 (1997). [7] Ramachandran, V. S. and Blakeslee, S.: Phantoms in the Brain: Probing the Mysteries of the Human Mind , Harpercollins (1998). [8] Smith, R., Self, M. and Cheeseman, P.: Estimating uncertain spatial relationships in robotics, Autonomous Robot Vehicules, Springer-Verlag New York, Inc., pp. 167–193 (1990). [9] Stoytchev, A.: Computational Model for an Extendable Robot Body Schema, Technical report git-cc-03-44, Georgia Institute of Technology, College of Computing (2003). [10] Thrun, S.: Robotic Mapping: A Survey, Exploring Artificial Intelligence in the New Millenium (Lakemeyer, G. and Nebel, B.(eds.)), Morgan Kaufmann, pp. 1–35 (2002). [11] Wren, C. R.: Large Networks of Ultra-low Resolution Sensors in Buildings, Proceedings of International Conference on Integration of Knowledge Intensive MultiAgent Systems, pp. 373–389 (2005).
© Copyright 2026 ExpyDoc