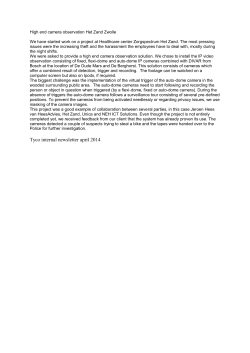
Computer Vision: 2D Camera Calibration 26-aug-14 Computer vision 3D Stereo camera Bumblebee 25 August 2014 Copyright © 2001 – 2014 by NHL Hogeschool and Van de Loosdrecht Machine Vision BV All rights reserved Thomas Osinga [email protected], [email protected] 3D Stereo Camera Bumblebee Overview: • • • • • Introduction to stereo vision Camera stereo parameters Accuracy with different baselengths Examples Advantages / Disadvantages 26-aug-14 3D Stereo camera Bumblebee Jaap van de Loosdrecht, NHL, vdLMV, [email protected] 2 1 Computer Vision: 2D Camera Calibration 26-aug-14 Introduction to stereo vision 26-aug-14 3D Stereo camera Bumblebee 3 Introduction to stereo vision • Stereo vision camera’s are used to perform 3D measurements • Stereo vision is based on the human eyes: The camera takes two snapshots from different positions. When a certain object can be identified as a pixel location in one image and in the other image, then the distance can be calculated based on the translation of the object pixel • Some problems in stereo vision: • Identifying of pixels in multiple images for matching the same world coordinates • Correct calibration of both camera’s, so the pixels can be correlated • Less accuracy on larger distances 26-aug-14 3D Stereo camera Bumblebee Jaap van de Loosdrecht, NHL, vdLMV, [email protected] 4 2 Computer Vision: 2D Camera Calibration 26-aug-14 Introduction to stereo vision • Identifying of pixels in multiple images for matching the same world coordinates: This can be solved with stereo vision algorithms. There are many algorithms available. A stereo vision SDK is delivered with the BumbleBee camera’s. 26-aug-14 3D Stereo camera Bumblebee 5 Introduction to stereo vision • Correct calibration of both camera’s, so the pixels can be correlated A stereo rig is used to calibrate the camera’s. The images have to be mapped to a pin-hole camera model. This image is called rectified. Raw image with lens distortion 26-aug-14 Rectified pin-hole image 3D Stereo camera Bumblebee Jaap van de Loosdrecht, NHL, vdLMV, [email protected] 6 3 Computer Vision: 2D Camera Calibration 26-aug-14 Introduction to stereo vision • Less accuracy on larger distances The distance calculation is based on the following equation: Dist ( m ) = f ( pix ) ⋅ base( m ) Disp ( pix ) in this equation f is the focal length of the lens in pixels. The disparity is the difference in x-direction of the pixel coordinates in both images 26-aug-14 3D Stereo camera Bumblebee 7 Introduction to stereo vision • Less accuracy on larger distances When the distance according to each pixelvalue is plotted, the following graph will appear Disparity -1,0033 y = 184,35x 2 R = 0,9972 16 14 Afstand(m) 12 10 Disparity 8 Macht (Disparity) 6 4 2 0 0 20 40 60 80 Pixelwaarde 26-aug-14 3D Stereo camera Bumblebee Jaap van de Loosdrecht, NHL, vdLMV, [email protected] 8 4 Computer Vision: 2D Camera Calibration 26-aug-14 Introduction to stereo vision To get a correct depth image, a few steps need to be taken: 26-aug-14 3D Stereo camera Bumblebee 9 Camera stereo parameters • Mode The BumbleBee camera’s have 7 different modes: 1: Raw Image 2: Rectified Color 3: Rectified 4: Disparity (this gives a depth image) 5: Disparity Color (this gives a depth image in false colors) 6: Disparity Validation (when certain area’s are not volidated in the vision algorithm they get a certain color) 7: Absolute (in this mode the absolute world coordinates are given) • Pan With this parameter the user can choose witch camera’s are used to perform stereo vision algorithm’s 26-aug-14 3D Stereo camera Bumblebee Jaap van de Loosdrecht, NHL, vdLMV, [email protected] 10 5 Computer Vision: 2D Camera Calibration 26-aug-14 Camera stereo parameters • Disparity The disparity range is the range of pixelvalues in wich the stereo algorithm searches for a best match. A disparity value of 0 means that an object is unlimited far away. A maximum disparity value means that this is the closest distance that an object can be measured • Disparity Mapping With disparity mapping the user can define a pixel range in wich the result pixels will be shown. This is comparable with a contrast stretch. • Stereo Mask The user can define the size of the mask that is used to correlate both images. • Edge Mask The user can define the size of the edge mask that is used to correlate both images. 26-aug-14 3D Stereo camera Bumblebee 11 Accuracy with different baselengths • To achieve higher accuray a bigger baselength is needed. When measuring the same distance with the same stereo camera’s on a bigger base. The accuracy will be like the following graph Nauwkeurigheid (m) Nauwkeurigheid 2,3 2,2 2,1 2 1,9 1,8 1,7 1,6 1,5 1,4 1,3 1,2 1,1 1 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1 0 Nauwkeurigheid 0 1 2 3 4 5 6 Basis (m) 26-aug-14 3D Stereo camera Bumblebee Jaap van de Loosdrecht, NHL, vdLMV, [email protected] 12 6 Computer Vision: 2D Camera Calibration 26-aug-14 Examples • Rectified Color Image 26-aug-14 3D Stereo camera Bumblebee 13 Examples • Disparity image (on 3m distance) 26-aug-14 3D Stereo camera Bumblebee Jaap van de Loosdrecht, NHL, vdLMV, [email protected] 14 7 Computer Vision: 2D Camera Calibration 26-aug-14 Examples • Disparity image (on 2m distance) 26-aug-14 3D Stereo camera Bumblebee 15 Examples • Disparity image (on 1m distance) 26-aug-14 3D Stereo camera Bumblebee Jaap van de Loosdrecht, NHL, vdLMV, [email protected] 16 8 Computer Vision: 2D Camera Calibration 26-aug-14 Advantages / Disadvantages • Advantages • High accuracy can be achieved by using the correct base • Accuracy on different distances can be calculated • When focal length of the lens is known, the needed base can be calculated for good accuracy • Disadvantages • Not possible to calculate distance of every pixel in the image • Accuracy is not linear 26-aug-14 3D Stereo camera Bumblebee Jaap van de Loosdrecht, NHL, vdLMV, [email protected] 17 9
© Copyright 2026 ExpyDoc