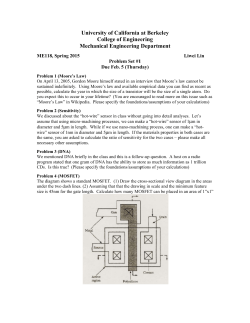
INEMO-M1 Hands On Part II Petr STUKJUNGER STMicroelectronics AMS Application Team, EMEA Region April 2014 Starting with INEMO-M1 Firmware package • Content of INEMO-M1 Firmware package • Using INEMO-M1 application examples in IAR • Using Serial port to read application feedback iNEMO-M1 Hands On 28/04/2014 2 Firmware folder structure • FreeRTOS – real-time operating system • Tilt compensated compass firmware • Usage examples of sensors on INEMO-M1 • Device firmware upgrade • Drivers of sensors on INEMO-M1 • M1 Discovery System – see next slide • Sensor libraries • USB library • Virtual COM port library • Standard peripheral library Notes: • All items are delivered in source codes • Sensor fusion AHRS algorithm is not delivered with iNEMO Suite, it is delivered separately on STEVAL-MKI121CD1 INEMO-M1 Hands On 28/04/2014 3 Connecting SWD flasher/debugger • Connect your SWD flasher/debugger dongle (ST-LINK or I-jet) to the M1 Discovery board using interconnection cable • The connector is sensitive to movements. After finishing flashing and debugging the board, disconnect the SWD dongle from the board. iNEMO-M1 Hands On 28/04/2014 4 Open iNEMO_M1_Applications workspace • Open the workspace from folder: Hands On \ Discovery-M1_Fw_Package \ iNemo_M1_Applications \ IAR \ iNemo_M1_Applications.eww • Choose an application: iNEMO-M1 Hands On 28/04/2014 5 Try out an application • Flash the M1 Discovery board with the first application (AccMag_AccDataReady) • There are 9 ready-to-use applications: • AccMag_AccDataReady – reading data from LSM303DLHC triggered by Data ready interrupt from accelerometer • AccMag_MagDataReady – reading data from LSM303DLHC triggered by Data ready interrupt from magnetometer • AccMag_Fifo – reading data from LSM303DLHC FIFO buffer • AccMag_Thresholds – using LSM303DLHC interrupt engine to detect a motion • Gyro_DataReady – reading data from L3GD20 triggered by Data ready interrupt • Gyro_Continuous – reading data from L3GD20 not triggered • Gyro_Fifo – reading data from L3GD20 FIFO buffer • Gyro_Thresholds – using L3GD20 interrupt engine to detect a motion • Press_DataReady – reading data from L3GD20 triggered by Data ready interrupt • Find detailed description of these applications in folder: Hands On \ Discovery-M1_Fw_Package \ iNemo_M1_Applications \ DOC \ INEMO_M1_Libraries_And_Examples.chm • There are also 3 other applications – solutions of our todays tasks. Do not open them now. iNEMO-M1 Hands On 28/04/2014 6 Find Serial line (COM port) number Start → Control Panel → Device Manager → Ports iNEMO-M1 Hands On 28/04/2014 7 Open Serial Terminal • You can use any serial terminal • You can find putty – serial terminal application for Windows – in the SW subfolder of seminar folder • Setup serial line session: • Selection Connection type: Serial • Serial line – COM port number you found in the previous step • Speed – 9600 • You can save the session for next time • Press Open to start the session iNEMO-M1 Hands On 28/04/2014 8 Tasks 1. Wake up for battery life saving 2. Using FIFO to save history of an event 3. Compass with tilt compensation General instructions • Do not start from scratch - use already done examples and libraries • Use datasheets and application notes provided • Do not hesitate to ask for help iNEMO-M1 Hands On 28/04/2014 11 TASK 1 – Instructions Wake Up for battery life saving • Description: Setup sensor(s) to trigger an interrupt when the board is moved • Requirements: • Req1: Movements in any direction are detected and indicated by LED1 flash • Req2: Power consumption is as low as possible (Optional task) • Real applications: • Wake up the system (device) when user is going to use it • Save power of the system when it is not used iNEMO-M1 Hands On 28/04/2014 12 TASK 1 – Solution Wake Up for battery life saving • Description: Setup sensor(s) to trigger an interrupt when the board is moved • Sensor used: Accelerometer • Project based on: AccMag_Thresholds, solution can be found in: Task_Wake_Up • Req1: Movements in any direction are detected and indicated by LED1 flash • Enable HP filter for AOI1 interrupt engine • Enable High event on X, Y and Z axis • Set threshold to 64mg • Add LED1 usage (include iNEMO_Led.h, call iNEMO_LED_Init), flash the LED1 every time an interrupt is detected • Req2: Power consumption is as low as possible (Optional task) • Enable Low power mode, disable High Resolution, select Little Endian mode • Keep ODR low (below 50Hz) • Do not enable magnetometer or gyro iNEMO-M1 Hands On 28/04/2014 13 TASK 2 – Instructions Using FIFO to store history of an event • Description: Setup the gyroscope to store history of a motion event • Requirement: • Req1: Store history of an event and show it in a terminal window • Real applications: • Store a movement and analyze it when there is a time for it • Decrease power consumption of the system – reading data from FIFO, instead of polling iNEMO-M1 Hands On 28/04/2014 14 FIFO use case - Saving history of an event Gyroscope data Threshold level Trigger event occurred Data sampling at ODR Time Sample no. 1 30 31 32 Data saved in FIFO FIFO ► History of the event trigger can be read from the FIFO at any time. (31 samples before trigger + trigger sample) • Way of operation • Data is being continuously stored in FIFO • When pre-selected trigger occurs, FIFO stops storing new data. • FIFO mode used: Stream-to-FIFO mode iNEMO-M1 Hands On 28/04/2014 15 TASK 2 – Solution Using FIFO to store history of an event • Description: Setup the gyroscope to store history of a motion event • Sensor used: Gyroscope • Project based on: L3GD20_Fifo and L3GD20_Thresholds, solution can be found in: Task_Fifo_History • Req1: Store history of an event and show it in a terminal window • Configure gyro to detect an event (use code from L3GD20_Thresholds) • INT1 pin is used to notify the MCU about the event – setup proper IRQ handler • Setup FIFO to work in Stream to FIFO mode • • • • Set FIFO watermark to 0 Read the entire content of the FIFO(32 samples) when trigger occurs Once the FIFO is in FIFO mode and full of samples, it stops To re-start the FIFO in Stream to FIFO mode, Bypass mode needs to be selected first • Recommended: add LED1 usage (include iNEMO_Led.h, call iNEMO_LED_Init), flash the LED1 every time an interrupt is detected iNEMO-M1 Hands On 28/04/2014 16 TASK 3 – Instructions Compass with tilt compensation • Description: Use sensor(s) to implement tilt compensated compass • Requirements: • Req1: Provide heading information, compensate it for a tilt • Real applications: • Compass • Navigation iNEMO-M1 Hands On 28/04/2014 17 TASK 3 – Solution Compass with tilt compensation • Description: Use sensor(s) to implement tilt compensated compass • Sensors used: Magnetometer and accelerometer • Project based on: AccMag_MagDataReady, solution can be found in: Task_Compass • Req1: Provide heading information, compensate it for a tilt • Use tilt compensated compass implementation from the iNEMO firmware package • Convert accelerometer data in m/s^2 • Convert magnetometer data in Gauss • Use iNEMO_TiltedCompass function • Convert result from radians to degrees iNEMO-M1 Hands On 28/04/2014 18 Thank You 19
© Copyright 2026 ExpyDoc