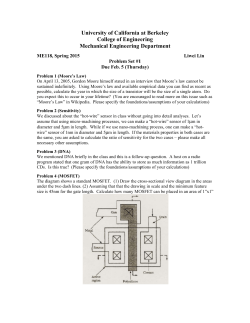
Appendix 2. PAM setup Equipment Overview The marine mammal acoustic monitoring system consists of: 1. At towed hydrophone comprising a sensor streamer section housed within 5m of ~35mm outer diameter polyurethane tube on a strengthened tow cable with a Kellum’s grip towing eye. (Cable length varies between applications typically between 200 and 400m) 2. A deck cable (typically between 50 and 75m) terminating in a splitter box which outputs mid frequency, high frequency acoustic signals providing and a depth sensor connection. 3. An amplifier and conditioning box, usually a Magrec HP 27ST with Behringer Mic2200 as a backup. 4. Sound card, typically a MOTU UltraLite MkIII Hybrid with on-board signal process in gas the primary device with a Berhinger 220 USB card as a backup 5. A Measurement Computing USB-1208 digital acquisition device for reading out the depth sensor. 6. Laptop computers 7. GPS Receiver, and USB serial adapter 8. Tools and spares The topside electronics have been packaged into a 19” rack mount flight case to provide a compact, coordinated and readily transported system. Equipment in detail 1. Sensor Streamer The oil-filled polyurethane tube steamer section contains. Two Magrec HP03 hydrophone/preamp units. Each consisting of spherical hydrophone elements feeding a broadband preamplifiers (Magrec HP/02.). The preamps have a low cut filter set at 2kHz and the units have a good frequency response between 2kHz and 150kHz. These elements are typically spaced 30cm apart Two Benthos AQ4 elements with matching Magrec HP02 preamplifiers. These have a low cut filter in the preamp to -3dB at 100Hz (50Hz on some hydrophones). The elements (AQ4s) are flat to 15kHz, and sensitivity is reasonable up to 30kHz. These hydrophones elements are spaced at 3m apart. Depth sensor based on Keller PA-9SE-20 bar 4-20mA sensor. The sensors are mounted within a 5m long, 35mm OD polyurethane tube filled with inert oil (Isopar M). Components are mounted on two 2.5 mm cords to provide strain relief and enclosed within plastic netting. The rear end-piece of the array incorporates a bleed-screw (6mm hex socket) which can be removed for filling and topping up the oil. The unit is terminated with a rope tail to maintain towing stability. The approximate location of components within this section is shown in Figure 1. Appendix 2. PAM setup A label at either the front or rear of the tube shows the hydrophone number, the sensors and their spacing and the pressure range of the depth sensor. These may vary from hydrophone to hydrophone. Make a note of these values, you will need to put them in the appropriate modules in PAMGUARD KEY MF Element AQ4 MF Element HS 150 MF Preamplifer HF Preamplifer Magrec HP/01 Depth Sensor Tow Cable 1.0 2.375 2.625 4.0 Rope Tail Figure 1. Approximate layout of elements and preamplifiers within the sensor streamer section Appendix 2. PAM setup 2. Tow cable. The tow cable contains several .22mm2 independently shielded twisted pair conductors to carry balanced signals as well as 0.5mm2 power conductors. A petroleum jelly waterblock compound fills the space between the cables. The conductors are all contained within an overall screen. A Kevlar braid provides mechanical strength and additional protection. The outer coating consists of two coverings of 1.4mm radial thickness polyurethane. The cable should be towed using the Kellum’s grip provided with an addition attachment being made for safety. The tow cable terminates in a male 19 pin Ceep connector. It is sometimes desirable to provide additional weight on the cable to make the hydrophone tow deeper (to get it below other gear for example). Strap on lead weights may have been provided for this. Alternatively this is done by adding chain as weight. Always add a layer of an appropriate tape to the outside of the cable before doing this to provide chafe protection. Often the streamer cable will have one or more lengths of polythene tube threaded over the cable. These are for chaffing protection and should be slid to the positions they are required and taped in place. 3. Deck Cable and Junction Box A deck cable is provided which is terminated at one end by a female 19 pin Ceep socket, to connect to the tow cable, and at the other to the Junction Box. Deck cables are typically between 50 and 75m depending on the application The Junction Box divides output from the hydrophone into a pair of acoustic channels with signals from the mid frequency and high frequency hydrophones respectively. Depth output is also provided. A lead with an appropriate plug is connected to the Measurement Computing USB-1208 voltage sensor unit which is usually mounted in a plastic box. Appendix 2. PAM setup General Hydrophone Wiring Scheme CEEP PIN 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 What HF Buccaneer FRONT SIGNAL FRONT RETURN REAR SIGNAL REAR RETURN LF Buccane er 3 5 4 6 HF FRONT SIGNAL 3 5 4 6 HF FRONT RETURN HF REAR SIGNAL HF REAR RETURN DEPTH + ve BLACK(ON SENSOR) DEPTH – ve WHITE (ON SENSOR) +12 V 0V Outer Screen 2 1 9 2 1 9 4. Balanced Amplifier and Conditioner units. Magrec HP27ST The primary unit is a Magrec HP/27st. This accepts balanced input from either the mid or high frequency hydrophone pairs through a 9 pin buccaneer plug and also provides power for the hydrophone streamer. Additional gain of 10-50dB and high pass filtering between 0 and 3k can be applied here. Two sets of balance outputs are provided through XLR sockets at the rear of the HP27st. One, marked "Balanced", is a balanced unfiltered output and should be connected to the sound card for detection of audioband and low ultrasonic signals. Appendix 2. PAM setup The other pair of outputs, marked "20kHz Bal Out" is a balanced output with a 20kHz high pass filter and is intended for detection of porpoises and other very high frequency cetaceans. Two headphone outputs with gain are available on the HP/27ST. Figure 2. Instrument case Containing Topside Electronics: HP26st Preamp/conditioner, Power Supply, Sound Card and Depth Sounder Reader Gain Control Headph one Socket High Pass filter (can filter out LF noise) Headphon e Volume Control Power Supply Sound Card Konnekt 24D Input from HP27 Depth Sensor Reader Junction Box – the yellow cable is the deck cable. The black connector (Ceep 19 pin) attaches to the tow cable. From the splitter box there are 3 outputs, one mid-frequency signal, one high frequency signal (and the depth signal. Appendix 2. PAM setup The Backup Preamplifier (Behringer) A second amplifier, usually a Behringer Ultragain Pro Mic 2200, is provided as a backup. This is a 240v mains powered unit. An adapter is provided to allow connection to either of the 9 pin Buccaneer leads from the Junction Box. The adapter consists of a female 9 pin Buccaneer socket, to connect either of the 9 pin male buccaneer plugs from the Junction Box, two XLR plugs to connect to the microphone inputs on the back of the Mic 2200 and a lead to provide 12v power to the hydrophone. Connect this to the 12v power supply taking care to observe the correct polarity. Some of these units have been adapted to provide an output with a 20 kHz high pass filter applied (suitable for harbour porpoise detection). On these units the 20 kHz filtered output is on the 3 pin XLR outputs at the rear of the unit while the unfiltered output is provided on the 6.3mm stereo jack sockets. Suggested Basic setup for the Mic 2200 There are two panels of matched controls on the front of the unit. Initially set up both channels to be the same. We suggest you use these settings intially, then experiment incrementally as requried. 1. 48v phantom power. Not required, button out. 2. Mic /Line button. This provides 10dB additional gain at the input. Start in the “Line" position. 3. Mic gain- adjustable gain at input. Start with a low value, increase until the 0dB on the output level lights occasionally. 4. If clip lights at any time (except for obvious overloading signals such as airguns) reduce gain. 5. Phase reverse button. Leave off – unless phase on one channel is reversed. 6. Low cut filter. Activate low cut filter (button 7). This will cut frequencies below the value chosen. Suggest start at maximum value of 320Hz and experiment to see whether it can be set lower. 8,9,10,11,12,13, these all control settings for additional filtering using a single parametric equaliser. Consult the Berhinger manual for details. We recommend you get the system Appendix 2. PAM setup working without this first – button 13 out - then revisit these settings with the help of the manual. Settings should normally be the same on both channels. 14. Output gain. Provides additional gain on the output. Adjust this so that that the output level on the meter (15) is not clipping on the loudest relevant sounds – i.e. not including extreme sound such as airgun pulses. 5. Sound Acquisition MOTU UltraLite Mk3Hybrid The MOTU Ultralite Mk3 Hybrid is a high quality sound card which can interface with a computer using either a Firewire or a USB2 interface and incorporates various on board DSP based functionality (such as filtering, equalisation, spectrogram display). Carrying out filtering on the sound card rather than within PAMGUARD has two main advantages: it reduces the processing load for the computer running PAMGUARD and it makes best use of the greater dynamic range from the higher bit length (24 bits) available on the card. The ability to interface via either USB or Firewire provides flexibility. Generally, if a Firewire port is available it will be preferable to use this for the MOTU keeping the USB ports free for data transfer from other peripherals. The unit can also be powered directly via a 6 pin Firewire connection. This is a powerful and flexible piece of equipment. Don’t be too worried by what can seem like a complicated interface as the standard settings are very straight forward. A useful introductory video is in the Motu folder in VP MMO to go. There is also a user manual which is worth reading and an accessible online introduction can be found here http://www.motu.com/products/motuaudio/ultralite-mk3/body.html Bear in mind that the primary market for this unit is for high quality audio mixing and consequently much of the functionality (such as reverb and mixing) will not be needed for our application. National Instrument USB 6251 DAQ The National Instruments card is a high speed data acquisition devices which can sample at a sufficiently high rate to be able to pick up very high frequency sounds. It will normally only be provided in a PAM system if it is necessary to pick up clicks form narrow band high frequency specialist such as porpoises, Cephalorhynchus dolphins or Kogia in the operating area. Appendix 2. PAM setup If these species are the principal “target” then the signal to noise ratio can be improved by connecting the NI card to the 20 kHz high pass filtered output on the back of the HP27. The card can sample two channels at up to 500 kHz and this is the configuration typically used for porpoise monitoring. The NI 6251 is connected to the computer using a USB cable. When it is on and actively collecting data both an amber and a green light should show on the front of the device. 6. Depth Sensor Readout A Measurement Computing USB-1208 digital acquisition device is used for reading the depth sensor. This is housed in a plastic case under the amplifier and conditioning unit. A cable from the front of this connects to the waterproof DC socket on the splitter box where it is labelled “depth”. The USB-1028 is connected to the computer via the USB cable. The drivers recognise individual 1208 cards individually. Thus, as the beginning of a project it may be necessary to run the Measurement Computing program Instacal to synchronise the computer and card. PAMGUARD can read this device but must be configured to display the voltage measured as a depth. 7. NMEA/ GPS Data The preferred method for receiving GPS data is to use the ships NMEA data feed which is normally provided as a serial signal. A serial/USB adapter and lead has been provided for this and also a 9 pin din connector in case you have to make your own connection. (NMEA data is output to pin 2, and pin 5 is used for ground on the serial connector.) Appendix 2. PAM setup Depth Sensor Approx 3m of thin rope attached to cable with cable ties - adds drag and prevent cable whipping around Balanced Amplifier and Conditioning Unit, Sound Card and Depth Sensor box Laptop Weights – enough to sink cable to ~20m Hydrophones within array Cables from splitter box are fed to unit and depth sensor box Splitter Box Waterproof Connector – this MUST! be disconnected before winch operation 350m Tow Cable Deck Winch – Large enough to carry 350m Cable 50m Deck Cable
© Copyright 2026 ExpyDoc