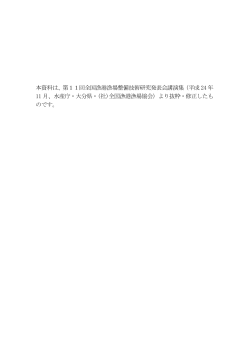
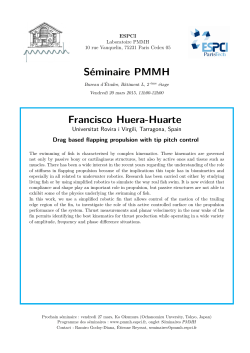
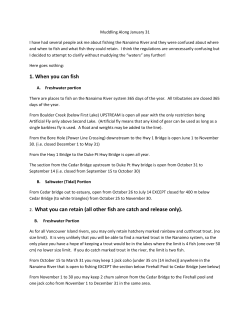
Design and Development of Robotic Fish Swarm Based Coast Monitoring System Atulya Shivam Shree ∗ Vikas Kumar Singh IIT Kanpur Kanpur - 208016 UP , India IIT Kanpur Kanpur - 208016 UP , India [email protected] Pratap Bhanu Solanki † [email protected] ‡ Dr. Laxmidhar Behera IIT Kanpur Kanpur - 208016 UP , India IIT Kanpur Kanpur - 208016 UP , India [email protected] ABSTRACT Regular monitoring and observation of sea coast is a challenging problem in context of critical applications like defence, detection of oil spills, chemical and biological observations. Automated coast monitoring systems could play a vital role when round the clock monitoring is a prime concern. In this paper, we propose an autonomous coast monitoring system using robotic fish. This paper focuses on design and construction of a single robotic fish, as well as the architecture of such an autonomous coast monitoring system capable of tactical surveillance. Multiple fish model is simulated using VRML in MATLAB wherein the behavior and effectiveness of the design is studied. Keywords Robotic fish, Coast-Monitoring System 1. INTRODUCTION From rising water levels at the coast to intrusion detection, from detection of oil spills to chemical and biological observations at the coast, the coast monitoring systems are prime concerns for almost all nations. For regular monitoring and observation of sea coast there is a need of round the clock monitoring systems. Human beings are definitely capable of ∗Final Year B.Tech Student,Dept. of Electrical Engineering †Final Year B.Tech Student,Dept. of Electrical Engineering ‡B.Tech Graduate,Dept. of Electrical Engineering §Dr. Laxmidhar Behera is working as a Professor in the Department of Electrical Engineering, Indian Institute of Technology, Kanpur § [email protected] these tasks but it is difficult for them to provide alert attention for 24 hours. This emphasizes the need for a smart, autonomous, and reliable coast monitoring system. Since last two decades, researchers have been working to understand and mimic fish motion in robots. In 1994 first robotic fish Robotuna was developed at [5], where they tried to mimic the Tuna fish. Earlier work in the area of multiple fish simulation includes research on formation control of multirobot fish [?], and realizes the formation, maintenance, and transformation of multi-robot fish, thus to obtain a whole and dynamic effect of multi-robot fish progress. The use of hierarchical architecture in a vision based closed loop experimental system consisting of five robotic fishes has been demonstrated by [6]. Recent advances in this field include the SHOAL project [8]. SHOAL has successfully developed and delivered intelligent robotic fish capable of working together to monitor pollution in ports and other aquatic areas. The initial stages of our work involved design of the robotic fish [1]. This paper is organised as follows. Section II gives a detailed overview of the improved design of the robotic fish. Section III focuses on the coast monitor- ing system covering architecture, tactical surveillance and contactless charging mechanism. Section IV presents the multiple fish simulation and its results. In the end we sum up with conclusion and references. 2. CONSTRUCTION OF ROBOTIC FISH The design of our robotic fish is inspired by natural fish Rohu. Rohu uses carangiform motion for its propulsion in which the most important part for generation of thrust is flexible rear part which is about two-third of the total body length [3]. We are using a Cascaded-3-joint Servo Mechanism to generate an increasing amplitude near-sinusoid wave from the rear part of the body [1]. Apart from thrust the 3 servos also help in turning of fish. This turning, upto some extent is similar to Yaw motion of rigid underwater vehicles. For changing the pitch motion we are using a linear movable mass mechanism which helps in shifting centre of mass of fish, the detail description is discussed in following subsection C. This section is subdivided into 4 parts: Part A describes the interior details of the fish skeleton. Part B gives the details of electronic circuit and components used in the system. Part C discusses the mechanics of movable mass mechanism. Part D discusses the design of outer cover. the equations 2. ⎧ 2 (xij − xij−1 )2 + (yij − yij−1 )2 = lij ⎪ ⎪ ⎪ ⎪ ⎨ ) yij = (c1 xij + x2ij )sin(kxij − 2πi M ⎪ ⎪ ⎪ ⎪ ⎩ φ = tan−1 ( yij −yij−1 ) − tan−1 ( yij−1 −yij−2 ) ij xij −xij−1 xij−1 −xij−2 2.1 Design of Inner Skeleton The structure of the Robotic Fish can be divided into two portions,the head and the flexible tail attached to it. The head comprises of an acrylic frame housing the microcontroller and peripherals, the moving mass mechanism and the Ob- stacle detection sensors . The tail has 3 servo motors forming a 3 joint structure. The joint angles θ1 , θ2 , θ3 describe the flexible tail motion. This motion can be described using a travelling wave as originally suggested by Lighthill [11]. 2 ybody (x, t) = (c1 x + c2 x ) sin(kx + ωt) where i indicates ith interval of time and j denotes joint number.Note that (xi0 , yi0 ) = (0, 0) The Schematic of our design has been shown in figure 3. The head has the control circuit in form of a PCB, a battery and the linear mass positioning system. The tail has the 3 motors fixed with the help of an aluminium frame. The entire mechanism is then surrounded by a rubber skin to waterproof the parts. Infrared sensors have been embedded in this skin in the front and bottom directions for detecting the environment. There is a sealed cap like opening in the bottom of the fish which provides access to the inner parts when required for charging the battery or wired programming of the microcontroller. (1) where, ybody is the transverse displacement of the tail unit ; x is displacement along the main axis; k is the wave no. ; λ is the wave length; c1 is the linear wave amplitude envelope; c2 is the quadratic wave amplitude envelope; ω = 2πf is wave frequency; f is the oscillating frequency of the tail; and t is time. In real fish there are a large number of vertebral units because of which it is able to generate a smooth wave. However in our case we have only 3 joints so generation of fish like smooth wave is difficult. Also we are using a microcontroller which cannot give continuous values for joint angles at each infinitesimally small interval of time. Hence there is a need of discretisation in both spatial and temporal domain. For discretisation in spatial domain we approximate the wave by fitting the links on the wave[6] ( i.e. only the end Unit points will lie on the perfect wave ). Considering the length of each link be lj (j = 1, 2, 3), to keep it non-dimensional, the ratio of the links must be normalized as to be independent of its actual size, i.e. l1 : l2 : l3 = m[l1 : l2 : l3 ], where m denotes ˘ s indicates the normalized length of the length factor, lj ˆ aAˇ the jth link, and especially l1 equals 1. Also let two endpoint coordinate pairs of each link lj be (xj−1 , yj−1 ) and (xj , yj ), respectively, and the joint angle between lj−1 and lj be φj . Once the amplitude coefficients ( i.e. c1 and c2 ) and k are determined , the shape of the propulsive wave at some time can be found. For discretisation in time domain we divide one time period into M intervals (i = 0, 1, ..., M − 1) and each unit is provided an index i. Now this sequence repeats itself again and again periodically to produce a wave. The joint angle at ith interval for joint j can be calculated using 2.2 Unit Microcontroller Board 6 DOF IMU Servo Motors Obstacle Detection Battery Wireless Communication Component Used Arduino Nano 328 LSM303LHDC Hitec HS-5646WP Servos Sharp Sensors GP2Y0A02YK 7.4V 3300mAh LiPo Battery XBee XB24-ACI Table 1: Details of electronic components used Joint 1 Joint 2 Joint 3 184 mm 7.4 V LiPo Battery Control Circuit Movable Mass m Details of Electronic Components For implementing fish like motion, the robot has 3 servo motors and 1 DC Motor in the Head portion to implement the pitch Control. The servo motors are run by PWM given by the central microcontroller, while the DC motor is controlled by an H-Bridge L293 IC present on-board. For sensing the environment it has 4 Sharp Infrared Sharp Sensors mounted on it. These are mounted in the forward, left, right and bottom directions and they give a feedback of the distance of an obstacle when they detect anything in front of it. Apart from this there is an IMU unit which has an accelerometer and a magnetometer. The purpose of this unit is to give an accurate value of the orientation of the fish in an absolute earth frame. Figure 2 shows various components mounted on main controller circuit board. Summary of electronic components used is tabulated in table 1. 540 mm IR Proximity Sensors (2) DC Motor Charging Point and Switch Figure 1: Schematic of Interior parts 2.3 Pitch Control Mechanism Over years fishes have evolved in remarkable ways to live at various depths. Predator fish such as sharks can come up to the surface and then submerge up to 1km for hunting. Normally fishes have a swim bladder which has a regulated amount of air in it. This bladder gives it an adjustable buoyant force to perform dives and ascents. In our model of the fish we maintain a constant buoyant force, but have a movable mass which can be used to vary the pitch angle by changing the position of centre of mass of the fish. The Wireless Transmitter Sensor Input Digital Pins 2. Net torque due to external forces calculated about centre of mass must be zero Microprocessor ⃗cm × B ⃗ =0 −P (4) ⃗cm = xcm x P ˆ + zcm zˆ (5) ⃗ cm = Bsinθˆ B x + Bcosθˆ z (6) where, Soving for θf θf = tan−1 ( 2.3.2 Motor Driver Accelerometer and Magnetometer Servo Motor Output Pins Figure 2: Control Circuit mechanical structure is enclosed by a rubber skin which gives it a continuous streamlined shape and a good aesthetic view. There are air gaps in between the mechanical structure and skin which provide the required buoyancy. This is crucial as it counteracts the weight of other portions of the body which have much more density than water. The different forces acting on the body are mentioned in Figure 3. Z Bouyancy Y X Drag horizontal COB COM Weight Static Analysis of Forces As has been pointed by Weihs [12] the conditions for stable equilibrium are: 1. The Buoyant force must equal the net weight B=W B − Mg g ⃗ ⃗ ⃗ ⃗cm = m1 P1 + m2 P2 + M PM P m1 + m2 + M Here, COB refers to centre of buoyancy, the effective point of application of buoyant force, COM refers to the centre of mass of fish, thrust force is produced by the oscillations of tail, drag force which is proportional to velocity, is produced by the water,θ is the angle between z axis and vertical, Pcm refers to the position of CM with respect to origin, Origin to be present at the centre of buoyancy 2.3.1 Computing Design Parameters m1 + m2 = Figure 3: Forces acting on the body (3) (7) Design of the fish involves first designing the 3D model of the outer skin. After this has been done the magnitude and effective position of the centre of buoyancy can be computed by treating the outer skin as enclosing a complete body of uniform density. The magnitude of the buoyant force is equal to the weight of water displaced by the outer body while CB is the volumetric centre of this solid model. Since this point is not subject to any change during the locomotion of fish hence it can be chosen as the origin of our coordinate system. The mass of the structure of the system is denoted by M . The Buoyant force as per this design is 29N while the mass M is 2.2kg . Hence additional objects have to be added to achieve submergence inside water. We denote these masses by m1 and m2 ; m2 is added in the rear position and remains fixed while m1 is added in the head portion of the skeleton. The mass m1 can be moved along the x axis by a DC motor driven screw thread mechanism. ⃗cm This produces a change in position of centre of mass, P which results in either an increase or decrease in elevation angle. The governing equations for m1 ,m2 and their posi⃗1 and P ⃗2 are: tions P Thrust α xcm ) zcm (8) (9) Figure 4 shows the dynamic action of the movable mass positioning system. For getting a symmetric relation between θ and x1 we set, θ = 0 at the position x1 = x1mean = (x1a + x1b )/2. We set xcm = 0, x1 = x1mean in equation [5] for x-axis and get the value of x2 as a function of m1 and m2 . The value of m1 should be much larger than m2 for the change in position of m1 to have maximum effect. But the values of x2 should also stay within the limits of the model so as to obtain a realistic solution. The values of m2 and x2 as predicted from our calculations should have scope for minor adjustments during the time of assembly. In this way their values can be tweaked to compensate for the difference in calculated values of buoyancy and mass M from their real values. 2.3.3 Kinematic Equations for the fish model Centre of Buoyancy (COB) DC Motor Control Circuit m1 2.4 Design of Outer Skin After designing the interior parts and electronic circuit of robotic fish there is an equal need of a good outer skin. The main function of the cover is to serve as a protective skin which waterproofs all electronic components so that they keep on working even if the fish is fully submerged in water. xmean m1 x1a m1 x1b 135 mm Figure 4: Pitch Control using Movable Mass The kinematic model assumes that the thrust force and the drag force act almost along the x- axis of the body. This nullifies the torque induced due to these forces. The change in position of CM is given by: ∆xcm m1 (x1 − x1mean ) = m1 + m2 + M (10) Since xcm = 0 at x1 = x1mean ∆xcm = xcm (11) The angular acceleration is given by : α= Bxcm cosθ − Bzcm sinθ I (12) where I is the moment of inertia of fish about its center of mass.The acceleration is brought about by the vector sum of the thrust and the drag forces a= T −D x ˆ M (13) The following table depicts the values of design parame- ters as computed using AutodeskTM Inventor. A prototype using these design parameters is being created and experiments will be performed on it to confirm the model predictions. Design Paramater dimensions Buoyancy Mass of fish Movable mass Position of CM Position of m2 Maximum change in CM Maximum pitch angle Symbol B M m (xcm ,zcm ) (x2 ,z2 ) θf Value 540x180x60 mm 29.00 N 2.178 kg 0.5 kg (-8.3, 29.2) mm (-161.8, -52) mm 8.8 mm 16.2 ◦ Table 2: Parameters for design Figure 5: CAD model of the Outer Skin The cover should be smooth enough to minimise the drag force and should be able to replicate the movements of inner skeleton. Besides it should give natural aesthetics of real fish. According to these constraints rubber seems to be a natural substute for skin. For our fish we are using Anabond-951 rubber. This rubber is highly elastic and stretches upto 5 times its natural length. Its tensile strength and hardness are good which can bear normal wear and tears. Another plus point of this rubber is that it comes in liquid form with one curing agent and is room temperature vulcanisable. Hence it is easy to handle in lab. There is no need to go to higher temperature for making any prototype with this rubber. We are using this rubber in liquid form to make a mold with the needful core. Figure 5 shows the 3D CAD model of outer cover of fish. 3. COAST MONITORING SYSTEM BASED ON ROBOTIC FISHES 3.1 Architecture of Coast Monitoring System The coast monitoring system consists of a group of 5 robotic fish (this number can be changed) and a base station which are connected to each other through wireless link. In underwater communication electromagnetic waves suffer high attenuation so it requires large wavelength which indeed results in use of large antennas. Such antennas cannot be mounted on small robotic fishes. Hence EM wave communication is not feasible here. In contrast to electromagnetic waves, optical waves do not suffer from such high atten- uation. However, optical wave communication under water suffers from significant scattering. The only feasible choice left is acoustic wireless communication. Hence acoustic wireless communication modules can be used for underwa- ter communication and networking. Underwater positioning systems are also available which are based on acoustic communication. The base station serves as a gateway for the wireless network of fish so it collects information from fishes and sends them to internet or any other accessible link. This base station also serves as a charging point for the fish. As each of fish is powered by lithium ion battery it needs regular charging. They can come one by one regularly to the base station and can get their batteries charged. To get a better idea Figure 6 illustrates the 3D arrangement of system. From the figures we can see that there is base station around which the fish are roaming and one fish is inside the cylindrical cavity of base station. This cylindrical cavity facilitates the fish to remain undisturbed while charging. The mechanism of charging is discussed later in subsection C. There is a chord emerging out of base station and going into the ground, this chord provides power and wired data connectivity to the base station. If this system is deployed for system. Accordingly base station can generate some signal to make concerned authority alert if there is any unusual activity. Then using the position of the particular robotic fish the concerned authority can do the needful tasks depending on the situation. 3.3 Contactless Charging Mechanism Since the fish have to remain submerged all the time so as to provide continuous monitoring, the normal plug charging will not be feasible in underwater environment. Hence we are planning to use inductive charging method. Here there will be no electrical contact between fish and the charger. Figure 7 shows the idea of inductive charging which include 2 coils one is primary which is connected to power supply at the charging point and there is secondary coil inside each of the fish which is connected to a battery charging circuit. Now if we supply an AC in the primary coil because of flux linkage an EMF will be generated across secondary coil. This EMF can be used to charge the powering battery of robotic fish circuit. Figure 6: 3D Illustration of proposed System defense it would be better if it remains hidden from outside. The fish can always hide themselves underwater as they are mobile. If the base station is also placed sufficiently below the level of water the whole system will remain camouflaged from surface. From Figure 6 it can be observed that the whole system lies underwater. Although this system is still visible from inside more advanced strategy can be employed for hiding the base station. Figure 7: Contactless Inductive charging 4. 3.2 Tactical Surveillance As mentioned earlier this system can be used for defence purposes. Here in this section we will present an strategy which can be employed using this system to detect and report any strange sea coast activity. Here we are assuming that any activity inside water is directly correlated with sound, for example when a ship arrives, it produces certain sound which is different from normal sea noise. Each one of the robotic fish can be equipped with hydrophones and underwater positioning system modules. Hydrophones are analogous of microphones for underwater. Hence when ship comes or other activity happens near any of the robotic fish it can detect that and inform other fish regarding the activity along with its position. The fish which are not involved in any other tasks can come to the specified position and can take collective decision and report about this to the base station. This collective decision will minimise the error probability and hence improves the reliability of decision. The position of each fish can be known by the underwater positioning system. Then the base station can figure out from its prior information whether the activity is expected or is unusual. Base station tracks the position of fish through positioning FISH SCHOOL SIMULATION FOR COAST MONITORING SYSTEM In this section the working of Robotic fish in group is illustrated through 3D simulation. The configuration of simulation environment is similar to the one explained in section III A. It consists of 5 robotic fish and a base station. Here we are assuming that we have a positioning system such that at each instant position of all fish is known. The mathematical model explained in [1] is used for each single fish in the simulation run. The image sequence of animated 3D simulation is shown in Figure 8. From Figure 8(a), all fish start spreading from a point, head towards their respective position of pentagonal formation. Finally they reach their respective positions as shown in (g). It is to be noted that one vertex of pentagon lies at base station where one fish gets its battery charged. Then to illustrate the consecutive charging of fish, from (h) to (l), each one of fish goes to the position of the next fish. In this way some other fish comes to charging point. Similarly in next turn next fish gets its battery charged. An illustration of gathering for collective decision is given through (m) to (t). One fish detect some unusual activity so it informs as possible strategies for intruder detection and reporting. Working strategy of the coast monitoring system has been demonstrated using simulink model. The robotic fish movement is observed in a simple environment. In the future, effective underwater communication and positioning system could be investigated. The robotic fish movement could be made robust enough to sustain large magnitudes of disturbance such as ocean tides. The sea noise is difficult to model in real time environment so some strategies need to be made for generating good approximated model of sea noise. Exploration of robotic fish swarm algorithm would enhance and optimize the coast monitoring system. 6. ACKNOWLEDGMENTS We wish to extend gratitude to our lab-mates at Intelligent Systems Laboratory - IITK for continuous encouragement and support during this work. Inputs from AnabondTM technical assistants led to proper selection of the rubber used for designing the outer cover of the fish body. Besides, we wish to thank 4i Lab technicians at IITK for their valuable guidance and feedback in designing and fabrication of the mold. Figure 8: Sequences in Multi-fish simulation 7. Figure 9: Trajectory of fish during simulation each other fish with the position and then all fish come together to the position of unusual activity. This way they can take collective decision to give more confidence to the detection. Figure 9 shows the trajectories of individual fish during the simulation. 5. CONCLUSION AND FUTURE WORKS This paper proposes a new improved design of a robotic fish based on movable mass mechanism. The improved design provides the added advantage of dynamic control of the pitch angle. With this robotic fish as the basis, we introduce a coast monitoring system which constitutes collective working of fish, under water contactless charging, as well REFERENCES [1] Pratap Bhanu Solanki, Samrat Dutta, Laxmidhar Behera, Design and 3D simulation of a Robotic Fish, International conference on Advances in Control and Optimisation of Dynamic Systems 2012. [2] Jindong Liu , Huosheng Hu , A 3D Simulator for Autonomous Robotic Fish,International Journal of Automation and Computing 1 (2004) 42-50 [3] M. Sfakiotakis, D. M. Lane, J. Bruce, C. Davies, Review of fish swimming modes for aquatic locomotion, IEEE Journal of Oceanic Engineering, ˇ vol. 24, no. 2, pp. 237ˆ a´LS252, 1999. [4] Junzhi Yu, Shuo Wang and Min Tan, A simplified propulsive model of bio-mimetic robot fish and its realization, Robotica (2005) volume 23, pp. ˘ S107. 101ˆ aA¸ [5] D. S. Barrett,” Propulsive efficiency of a flexible hull under water vehicle”, Ph.D. dissertation, Massachusetts Institute of Technology, Massachusetts Avenue, Cambridge, 1996. [6] Junzhi Yu ,Long Wang, Jinyan Shao, Min Tan ˘ aAIJControl ˆ and Coordina- tion of Multiple ˘ IEEE Biomimetic Robotic Fishˆ aAIJ TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 15, NO. 1, JAN- UARY 2007 [7] http://web.mit.edu/towtank/www/Pike/pike.html [8] http://www.roboshoal.com/media/2682/220512 shoal launch press- release lne lc final.pdf [9] http://www.nmri.go.jp/eng/khirata/fish/ [10] www.festo.com/net/en corp/SupportPortal/Downloads/146913 [11] M. J. Lighthill, Note on the swimming of slender fish, J.Fluid Mech., vol. 9, pp. 305317, 1960. [12] Daniel Weihs, Stability Versus Maneuverability in Aquatic Locomo- tion INTEG. AND COMP. BIOL., 42:127134 (2002)
© Copyright 2026 ExpyDoc